4 setpoint selection, 5 setpoint interpolation, Setpoint selection – Lenze E94AxHE Technology Application CiA402 Device profile User Manual
Page 146: Setpoint interpolation
9400 Technology applications | CiA402 device profile
Parameter setting & configuration
Cyclic synchronous position mode (IEC 61800-7)
146
L
EDS94TA11010xxxx EN 1.2 - 03/2010
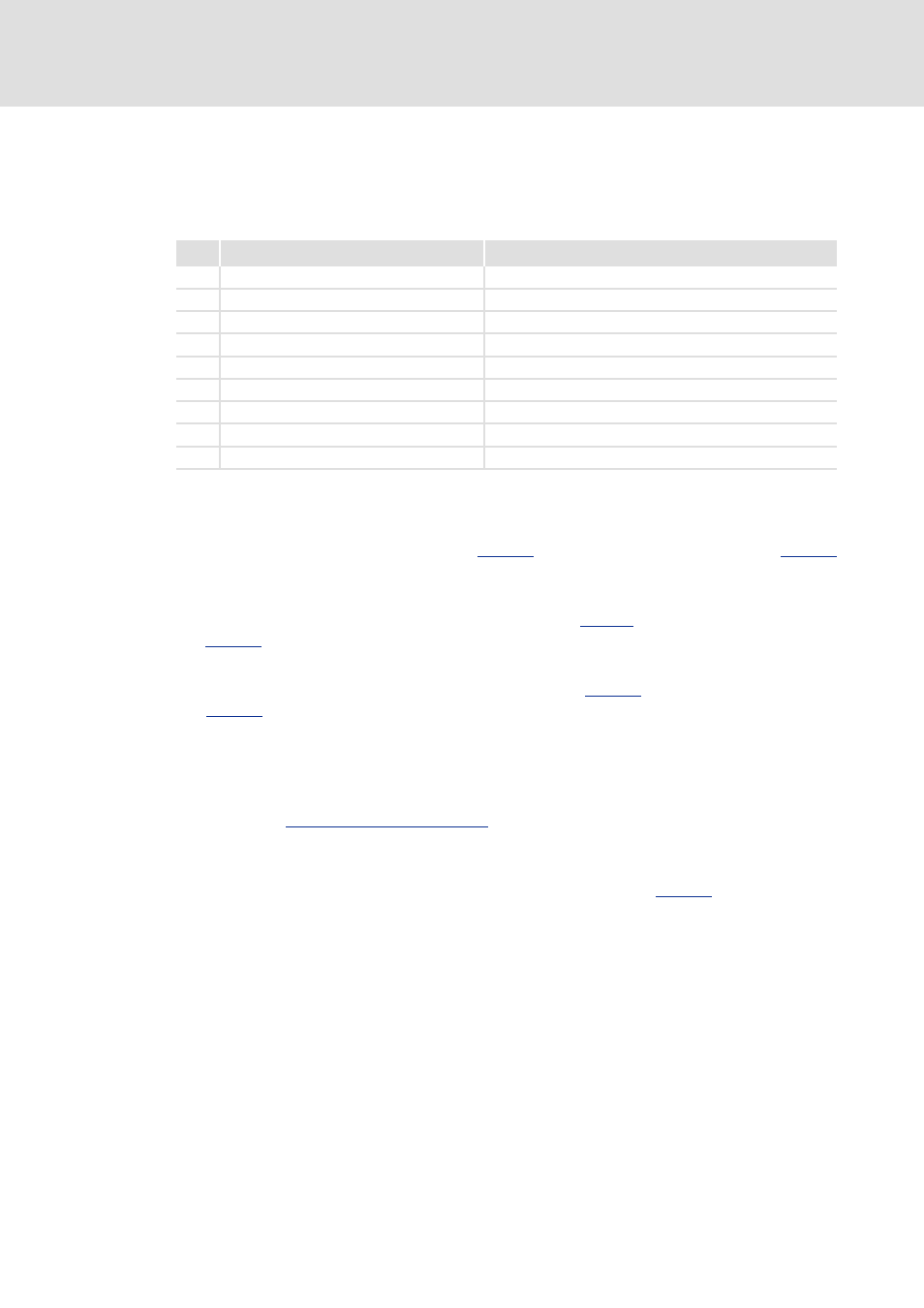
Internal variables of the motor control (oscilloscope signals)
The red numbers in brackets specified in the signal flow represent internal variables of
the motor control which can be recorded with the oscilloscope for diagnostic and
documentation purposes.
3.12.4
Setpoint selection
The position setpoint is selected via the
object (target position). Use the
object (offset position) to additionally define an offset which is added to the position
setpoint.
The speed feedforward control value is selected via the
object (target velocity). Use
the
object (offset velocity) to additionally define an offset which is added to the
speed setpoint.
The torque feedforward control value is selected via the
object (target torque). Use
the
object (torque offset) to additionally define an offset which is added to the
torque feedforward control value.
3.12.5
Setpoint interpolation
Similar to the "
", the resulting position setpoint is interpolated
in this operating mode as well, if the communication cycle time differs from the control
cycle time of the controller (1 ms).
For the determination of the required interpolation steps the
(interpolation time period) is used.
No. Variable of the motor control
Meaning
(1)
Torque.dnTotalTorqueAdd
Additive torque feedforward control value
(2)
Torque.dnTorqueSetpoint
Torque setpoint
(3)
Position.dnActualLoadPos
Actual position
(4)
Position.dnPositionSetpoint
Position setpoint
(5)
Position.dnActualMotorPos
Current motor position
(6)
Position.dnContouringError
Following error
(7)
Speed.dnOutputPosCtrl
Output signal - phase controller
(8)
Speed.dnSpeedSetpoint
Speed setpoint
(9)
Speed.dnActualMotorSpeed
Current motor speed