11 interpolated position mode, 1 input and output data, Interpolated position mode – Lenze E94AxHE Technology Application CiA402 Device profile User Manual
Page 131: Input and output data, Lect, Interpolated, Position mode, Stop
EDS94TA11010xxxx EN 1.2 - 03/2010
L
131
9400 Technology applications | CiA402 device profile
Parameter setting & configuration
Interpolated position mode
3.11
Interpolated position mode
The "Interpolated position mode" is required for a coordinated traversing of axes
depending on each other or for traversing of single axes with time interpolation of the
setpoints.
Selection of operating mode
The "Interpolated position mode" is selected using the value "7" via the
object
(mode of operation).
3.11.1
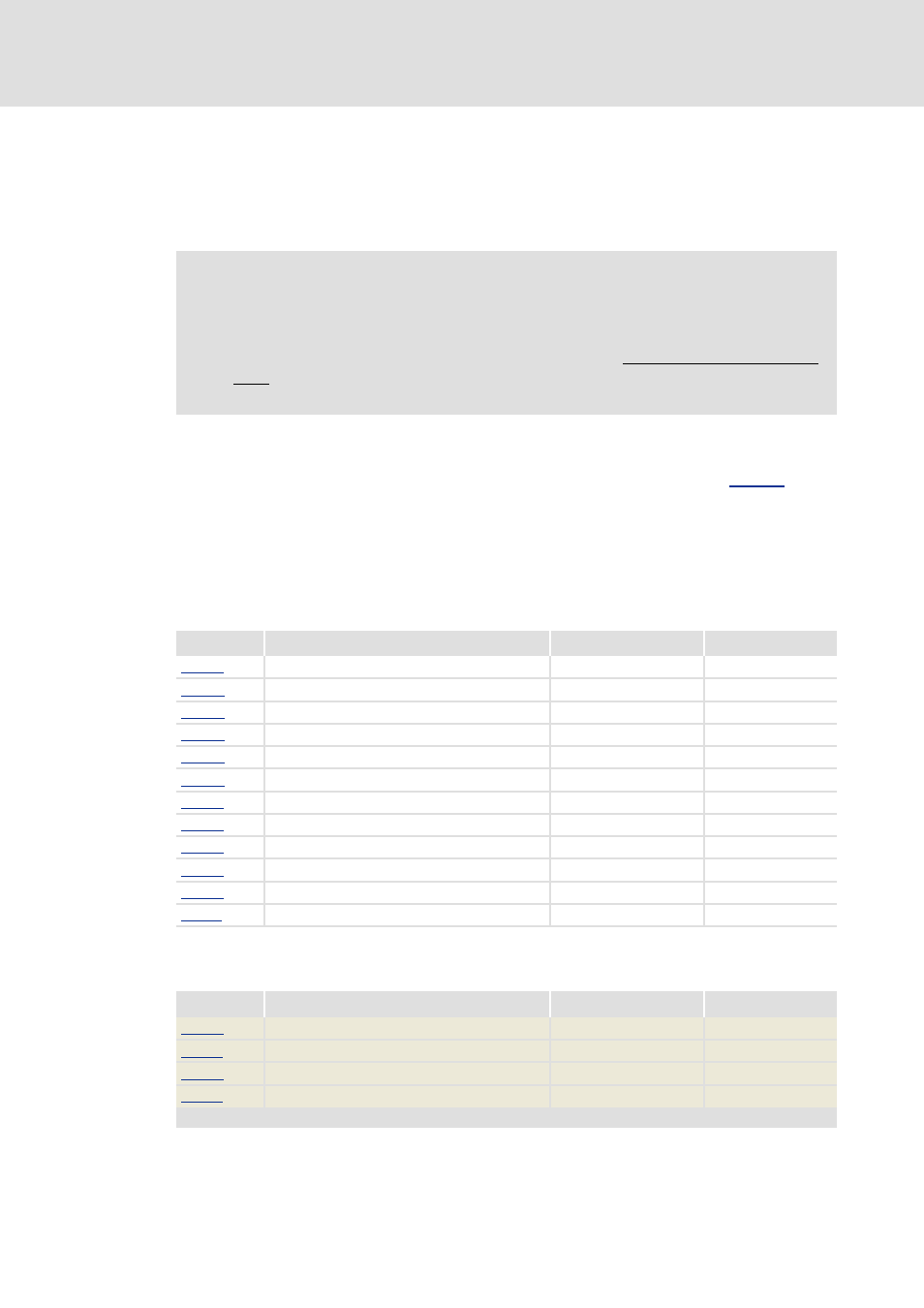
Input and output data
Input data
Output data
Stop!
If a limit switch is approached using this operating mode and an error is caused
followed by the "Quick stop by trouble" response, a setpoint/actual value
adjustment of the position must always be executed before acknowledging the
error as otherwise an uncontrolled motor movement may occur after
acknowledging the error!
Index
Name
Data type
Object type
Control word
UNSIGNED_16
VAR
Interpolation sub mode select
INTEGER_16
VAR
Interpolation data record
INTEGER_32
ARRAY
Interpolation time period
UNSIGNED_32
RECORD
Interpolation data configuration
UNSIGNED_32
RECORD
Home offset
UNSIGNED_32
VAR
Following error window
UNSIGNED_32
VAR
Position window
UNSIGNED_32
VAR
Torque offset
INTEGER_32
VAR
Target torque
INTEGER_32
VAR
Offset velocity
INTEGER_32
VAR
Target velocity
INTEGER_32
VAR
Index
Name
Data type
Object type
Status word
UNSIGNED_16
VAR
Position demand value*
INTEGER_32
VAR
Position actual value*
INTEGER_32
VAR
Following error actual value
INTEGER_32
VAR
Grayed out = read access only