Delta Electronics AC Motor Drive VFD-E User Manual
Page 345
Appendix D How to Use PLC Function|
D-62
Revision June 2008, 04EE, SW--PW V1.11/CTL V2.11
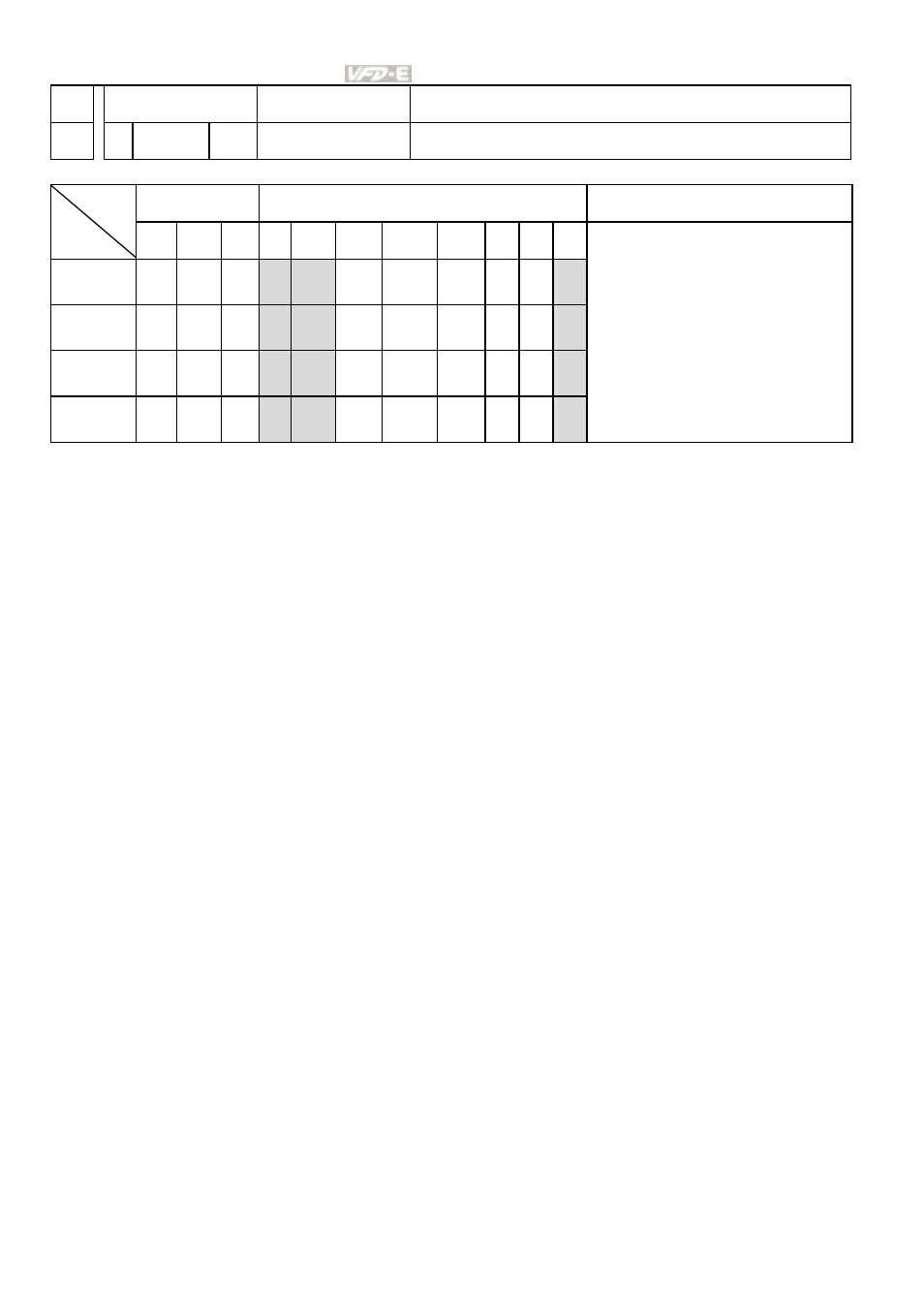
API
Mnemonic
Operands Function
141
FPID
P
S1, S2, S3, S4
PID control for the AC motor drive
Bit Devices
Word devices
Program Steps
Type
OP
X Y M K H
KnX KnY KnM T
C
D
S1
* *
*
S2
* *
*
S3
* *
*
S4
* *
*
FPID, FPIDP: 9 steps
Operands:
S1: PID Set Point Selection(0-4), S2: Proportional gain P (0-100), S3: Integral Time I (0-10000), S4:
Derivative control D (0-100)
Explanation:
1.
This command FPID can control the PID parameters of the AC motor drive directly,
including Pr.10.00 PID set point selection, Pr.10.02 Proportional gain (P), Pr.10.03
Integral time (I) and Pr.10.04 Derivative control (D)
Program Example:
1.
Assume that when M0=ON, S1 is set to 0 (PID function is disabled), S2=0, S3=1 (unit:
0.01 seconds) and S4=1 (unit: 0.01 seconds).
2.
Assume that when M1=ON, S1 is set to 0 (PID function is disabled), S2=1 (unit: 0.01),
S3=0 and S4=0.
3.
Assume that when M2=ON, S1 is set to 1(frequency is inputted by digital keypad), S2=1
(unit: 0.01), S3=0 and S4=0.
4. D1027:
frequency
command controlled by PID.