Chapter 4. programming – IAI America S-SEL-E User Manual
Page 203
Page 198
Chapter 4. Programming
4.
Path Movement Command
In the Super SEL Controller, accurate path motion profiles can be achieved by passing through the exact points regardlesso
f
changes in speed settings.
Program of Locus above
Locus
Programming
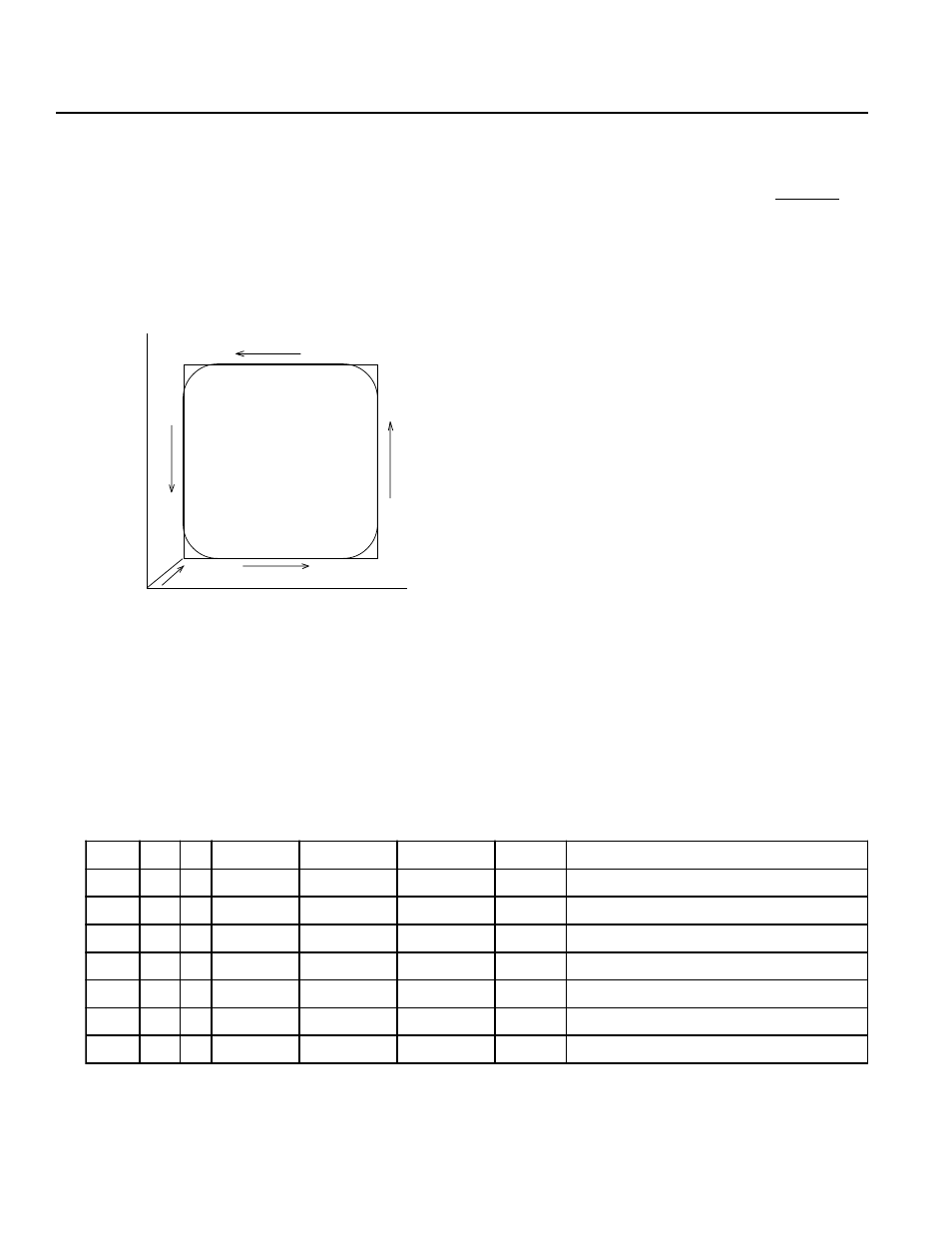
A path motion program can be constructed easily with only a
starting point and end point. Therefore, a program takes only
one line regardless of the number of passing points between
the starting point and end point.
1.
Set Position No.1 (P1) coordinate data (Starting Point).
2.
Set coordinate date for Position No. 2 (P2) through
Position No. 4 (P4) (passing points), and Position No. 5
(P5) (end point). For continuous path movement, set the
passing points in the sequence you wish them to move.
3.
Use the MOVL command to move to Position No.1, and
make this the starting point of the path movement.
4.
Use the PATH command to set the starting point (P1) in
OPRND1 and the end point (P5) in OPRND2.
* The direction of the path movement can be reversed
by exchanging the start and end points.
Y
Axis
P4
P1, P5
l
l
l
l
Start point · End point
0
X Axis
Step
A/O
N
OP-Code
Operand 1
Operand 2
Post
Comment
1
HOME
11
X and Y axes homing (Servo ON)
2
VEL
200
Velocity 200mm/s setting
3
ACC
0.3
Acceleration 0.3G
4
MOVL
1
Move to position no. 1 (starting point)
5
TAG
1
6
PATH
1
5
Path motion from position no. 1 to no. 5
7
GOTO
1
Jump to TAG 1