Chapter 4. programming, Part 5 parameter list – IAI America S-SEL-E User Manual
Page 193
Page 188
Chapter 4. Programming
Part 5
Parameter List
All system parameters are appropriately set at the time of shipment. Basically, the user does not need to change the parameters but
if you need to change them for a special system or requirements, please contact our technical service department. Also, please
save the parameters when you change them. Doing a reset after rewriting the parameters or after applying an emergency stop,
validates the new parameters.
The following tables are the initial values displayed by the Teaching Pendant. The actual parameters set at the time of shipment
will differ depending on the actuators in your particular system.)
1.
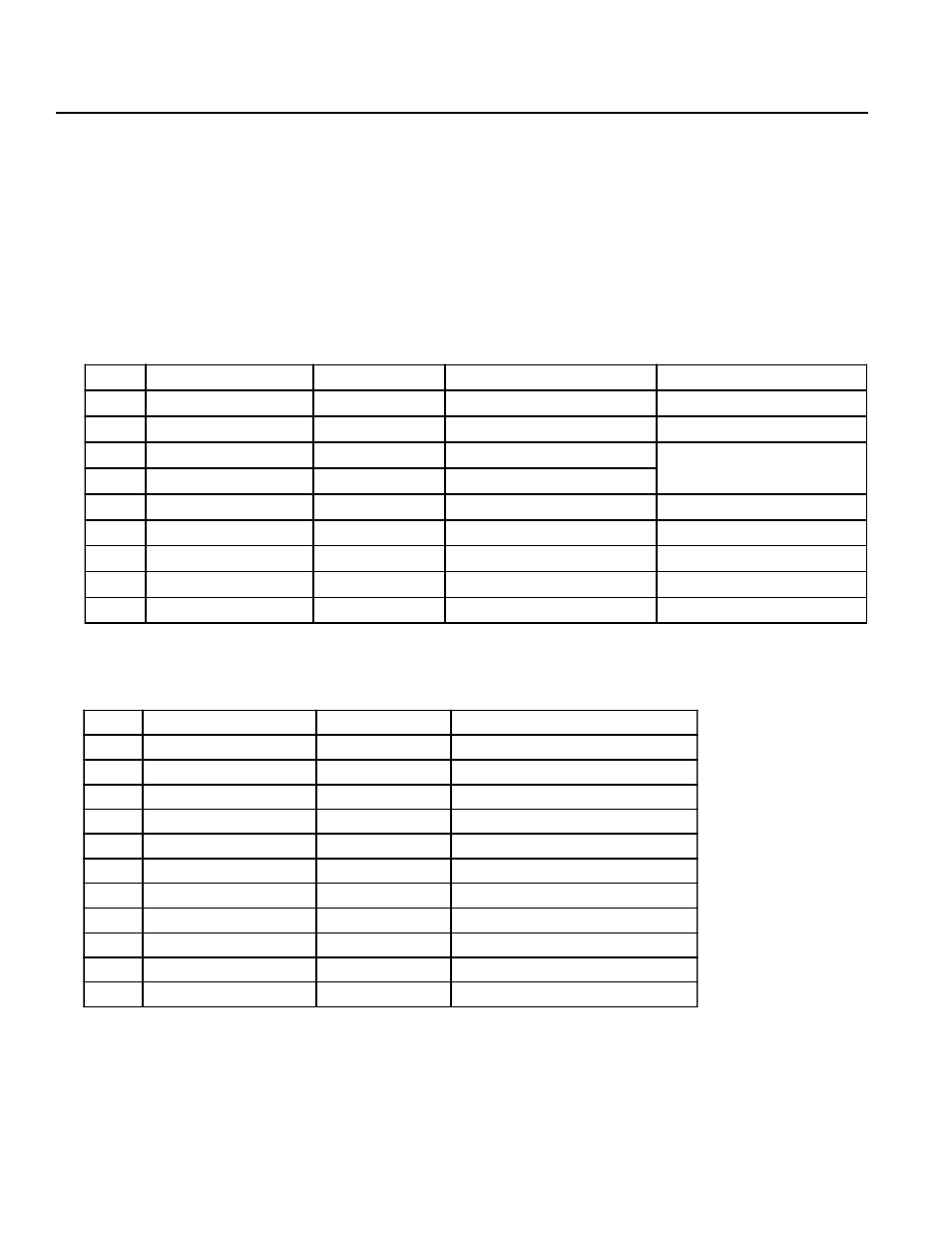
Axis Parameters
(a) Servo control related (Srvo)
*Currently, a common parameter is used for Over Ride so this is not available.
(b) Homing
N o .
P a ra m e te r N a m e
D e fa u lt
C o n te n ts
R e m a rk s
1
N u m e ra to r
1
N u m e ra to r
U s a b le
2
D e n o m in a to r
1
D e n o m in a to r
U s a b le
3 *
O v e r rid e (% )
1 0 0
O v e r rid e
U n u s e d , s e t w ith th e s e rv o
d e v ic e
4
A c c e le r (G )
0 .3 0
A c c e le ra tio n
5
J o g Ve l
3 0
J o g v e lo c ity
Ve lo c ity d u rin g Te a c h m o d e
6
P e n d B a n d
1 0
P o s itio n e n d b a n d (P u ls e )
7
S o ft L im it O ff
2 .0 0
S o ftw a re lim it o ffs e t
8
S o ft L im it (+ )
9 9 9 9
S o ftw a re lim it (+ )
9
S o ft L im it (-)
0
S o ftw a re lim it (-)
N o .
P a ra m e te r N a m e
D e fa u lt
C o n te n ts
1
H o m e D ir
0
H o m e d ir e c tio n
2
H o m e T y p e
0
H o m in g m e th o d
3
* 1
H o m e S e q u e n c e
0 ~ 9
S e q u e n c e ( a x is u s e d · u n u s e d )
4
H o m e S w P o l
1
L im it in p u t p o la rity
5
H o m e Z E d g e
1
Z - p h a s e s e n s in g e d g e
6
* 2
H o m e C r e e p V e l
0
C r e e p v e lo c ity
7
H o m e B a c k V e l
1 0
R u n - in v e lo c ity
8
H o m e Z V e l
5
Z - p h a s e s e a r c h v e lo c ity
9
H o m e O ffs e t
0
O ffs e t m o v e a m o u n t (le n g th )
1 0
H o m e D e v ia tio n
6 6 7
H a r d s to p d e v ia tio n (p u ls e )
11
H o m e C u r re n t
6 0
C u r r e n t lim it
*1 If you set any number between 1~9, you can designate the homing sequence of the axes being used. If you
set the number 0, the designated axis becomes an unused axis (unconnected).
*2 The creep function is only available for units with the limit switch option. Always set this value to 0. If it is
set to a value other than 0 in actuators without the limit switch, homing will not be executed properly.