Chapter 3. multi-tasking – IAI America S-SEL-E User Manual
Page 104
Page 99
Chapter 3. Multi-tasking
Part 2
Screwdriving Robot System
This chapter explains the screwdriving robot system operated by the Super SEL Controller.
1.
Components Used:
Automatic screwdriver with air cylinder (Z axis)
Screw feeder
X axis actuator:
Intelligent Actuator 60W, 300mm model
Y axis actuator:
Intelligent Actuator 60W, 300mm model
Controller:
Super SEL (Type G)
2.
Operation:
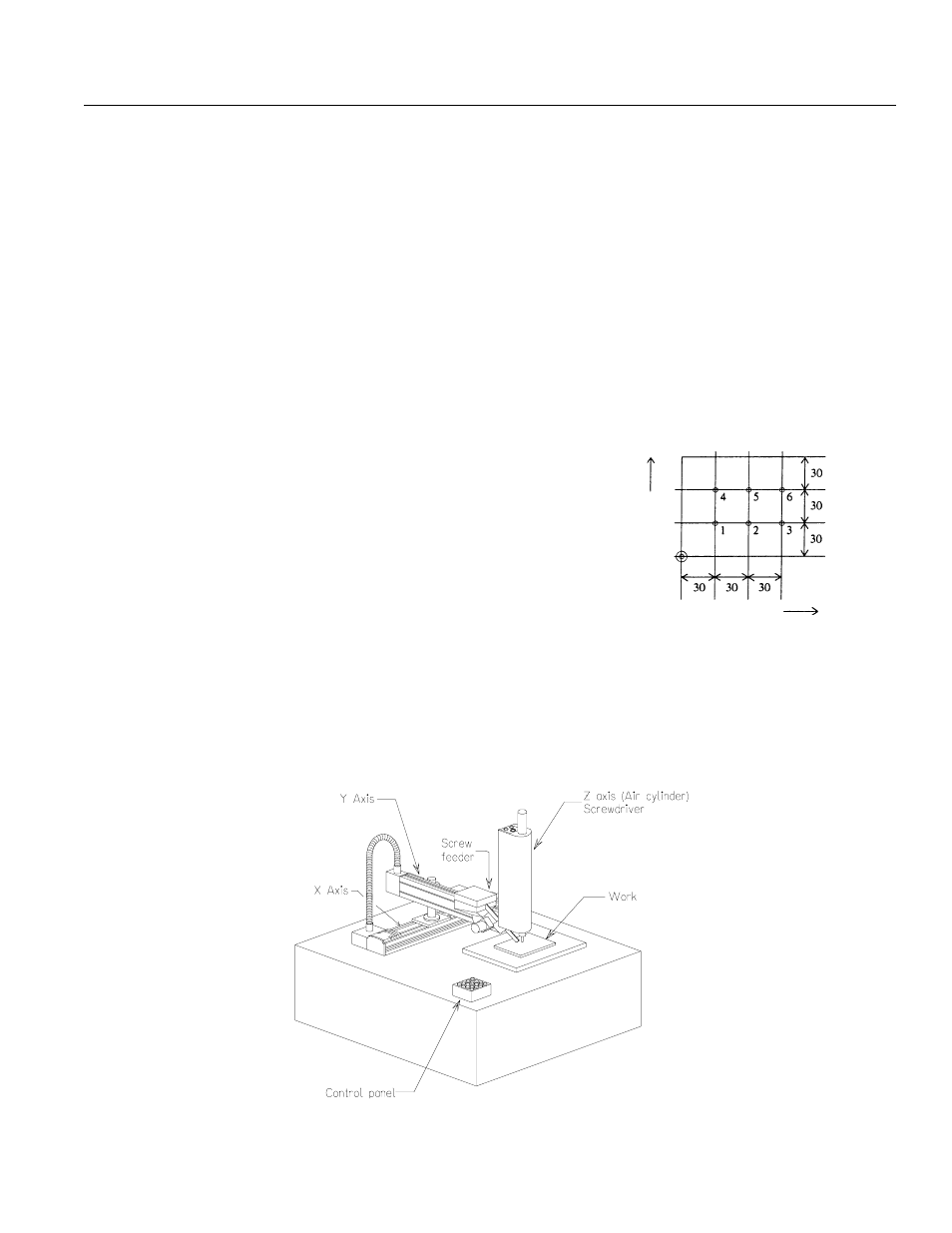
(1) Screwdriving six screws each 30mm apart on both X and Y axes
X and Y axes move to a screwdriving position.
Z axis (air cylinder) goes down.
Begins screwdriving.
Completes screwdriving, then Z axis goes up.
X and Y axes move to the next position.
(2) The parts feeder moves simultaneously with the
above operation.
Screw feeder starts feeding when screws are depleted.
Screw feeder stops feeding when screws are full.
3. Screwdriving System Illustration
The system consists of the X and Y actuators, automatic screwdriver and screw feeder. The screwdriver is positioned by the
actuators, and screws are supplied by the feeder.
Position Coordinates
Y axis
X axis