Chapter 4. programming – IAI America S-SEL-E User Manual
Page 130
Page 125
[Function]
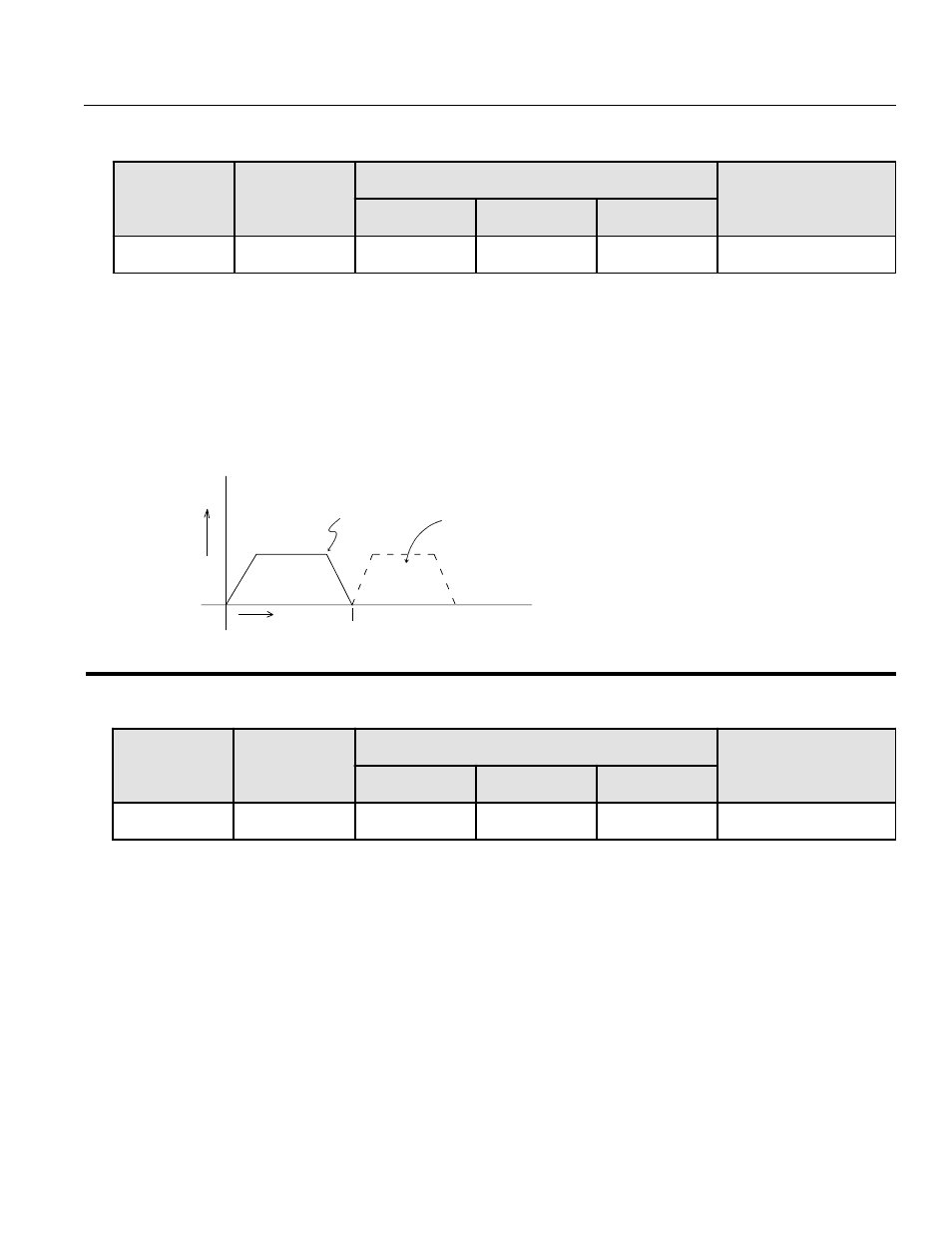
Designates an input port for sending a command to decelerate and stop while a move command is being
executed. If the actuator is moving and the designated input port turns ON, then velocity decreases until all
motion stops. Any other programmed motion thereafter is cancelled and not executed.
* HOLD and CANC cannot be used in the same program. (If both are written in the same program, the
command that is designated later is the one that becomes effective).
[Example] CANC 25
When input port 25 turns ON, velocity decreases until all motion stops. All motion after this is cancelled.
CANC (Cancel : Cancelling the next steps after axis stop motion)
BASE (Axis Base Designation) (This command is not supported by the tabletop type TT-300.)
[Function] Count axes starting with the designated axis as the first axis.
[Example] HOME 11
Axis No.1 and Axis No.2 perform homing.
BASE 3
Axis No.3 is counted as the first axis.
HOME 11
Axis No.3 and Axis No.4 perform homing.
After homing, Axis No.3~8 move by designating Axis No.1~6 (axis pattern and position
data).
Chapter 4. Programming
V
t
Input 25
ON
Motion Completed
The rest is cancelled
* During PATH motion designation, the
actuator moves to the next position. Any
other programmed motion thereafter is
cancelled and not executed.
E x p a n s i o n
c o n d i t i o n
( A N D · O R )
I n p u t
c o n d i t i o n
( I / O · F l a g )
C o m m a n d
P o s t
( O u t p u t p o r t · F l a g )
C o m m a n d
O p e r a n d 1
O p e r a n d 2
O p t i o n a l
O p t i o n a l
C A N C
I n p u t p o r t
E x p a n s i o n
c o n d i t i o n
( A N D · O R )
I n p u t
c o n d i t i o n
( I / O · F l a g )
C o m m a n d
P o s t
( O u t p u t p o r t · F l a g )
C o m m a n d
O p e r a n d 1
O p e r a n d 2
O p t i o n a l
O p t i o n a l
B A S E
A x i s n o .