2 version differences, 1 version 2.02, 2 version 2.04 – Delta Electronics AC Motor Drive VFD-VE Series User Manual
Page 75: 2 version differences -26, 1 version 2.02 -26, 2 version 2.04 -26
Chapter 4 Parameters|
4-26
Revision August 2008, 03VE, SW V2.04
4.2 Version Differences
4.2.1 Version 2.02
New or update parameter groups are:
Group 2: Digital Input/Output Parameters
Group 3: Analog Input/Output Parameters
Group 6: Protection Parameters
Group 8: High-function PID Parameters
Group 10: Speed Feedback Control Parameters
4.2.2 Version 2.04
New or update parameter groups are:
Group 0 System Parameters
Group 2: Digital Input/Output Parameters
Group 3: Analog Input/Output Parameters
Group 5: Motor Parameters
Group 6: Protection Parameters
Group 8: High-function PID Parameters
Group 10: Speed Feedback Control Parameters
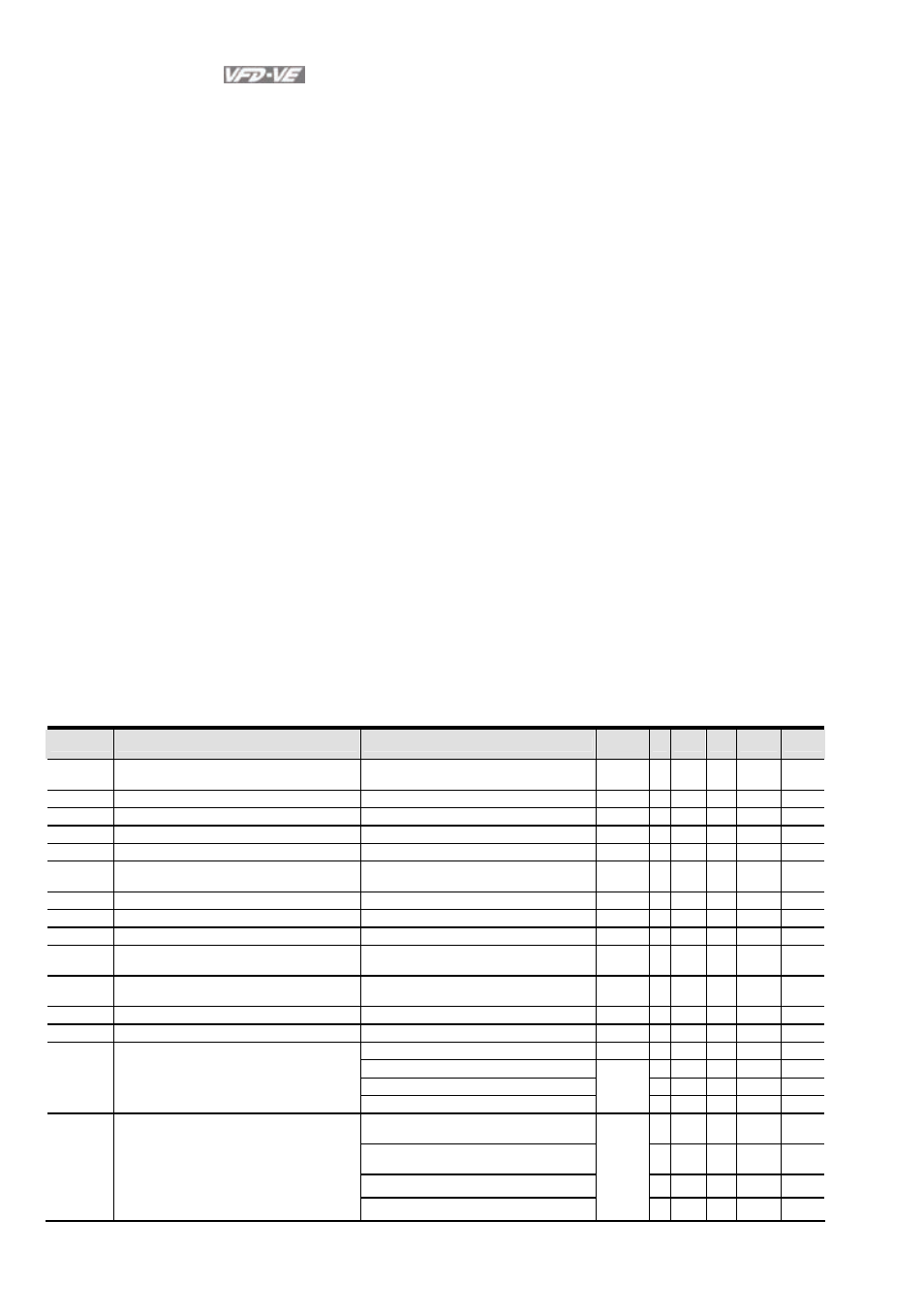
Version 2.02
Group 2 Digital Input/Output Parameters
New settings are marked in bold. In version 2.02, the parameters are from Pr.02-00 to Pr.02-34.
Pr.
Explanation
Settings
Factory
Setting
VF VFPG SVC FOCPG TQRPG
02-01
Multi-Function Input Command 1 (MI1)
(it is Stop terminal for 3-wire operation)
27: ASR1/ASR2 selection
○
○
02-02
Multi-Function Input Command 2 (MI2)
28: Emergency stop (EF1)
○
○
○
○
○
02-03
Multi-Function Input Command 3 (MI3)
29: Signal confirmation for Y-connection
○
○
○
○
02-04
Multi-Function Input Command 4 (MI4)
30: Signal confirmation for
Δ−connection
○
○
○
○
02-05
Multi-Function Input Command 5 (MI5)
31: High torque bias (by Pr.07-29)
○
○
○
○
○
02-06
Multi-Function Input Command 6 (MI6)
(specific terminal for TRG)
32: Middle torque bias (by Pr.07-30)
○
○
○
○
○
02-23
Multi-Function Input Command 7
33: Low torque bias (by Pr.07-31)
○
○
○
○
○
02-24
Multi-Function Input Command 8
34: Enable multi-step position control
○
○
02-25
Multi-Function Input Command 9
35: Enable position control
○
○
02-26
Multi-Function Input Command 10
36: Enable position learning function
(valid at stop)
○
○
02-27
Multi-Function Input Command 11
37: Enable pulse position input
command
○
○
02-28
Multi-Function Input Command 12
38: Disable write EEPROM function
○
○
○
○
○
02-29
Multi-Function Input Command 13
39: Torque command direction
○
02-30
Multi-Function Input Command 14
40: Force stop
○
○
○
○
○
41: Serial position clock
○
42: Serial position input
○
43: Analog input resolution selection
○
02-11
Multi-function Output 1 RA, RB,
RC(Relay1)
29: Output when frequency >= Pr.02-33
○
○
○
○
○
02-12
Multi-function Output 2
MRA, MRC (Relay2)
30: Output when frequency < Pr.02-33
○
○
○
○
○
02-13
Multi-function Output 3 (MO1)
31: Y-connection for the motor coil
○
○
○
○
02-14
Multi-function Output 4 (MO2)
32:
Δ connection for the motor coil
○
○
○
○