Delta Electronics AC Motor Drive VFD-VE Series User Manual
Page 170
Chapter 4 Parameters|
Revision August 2008, 03VE, SW V2.04
4-121
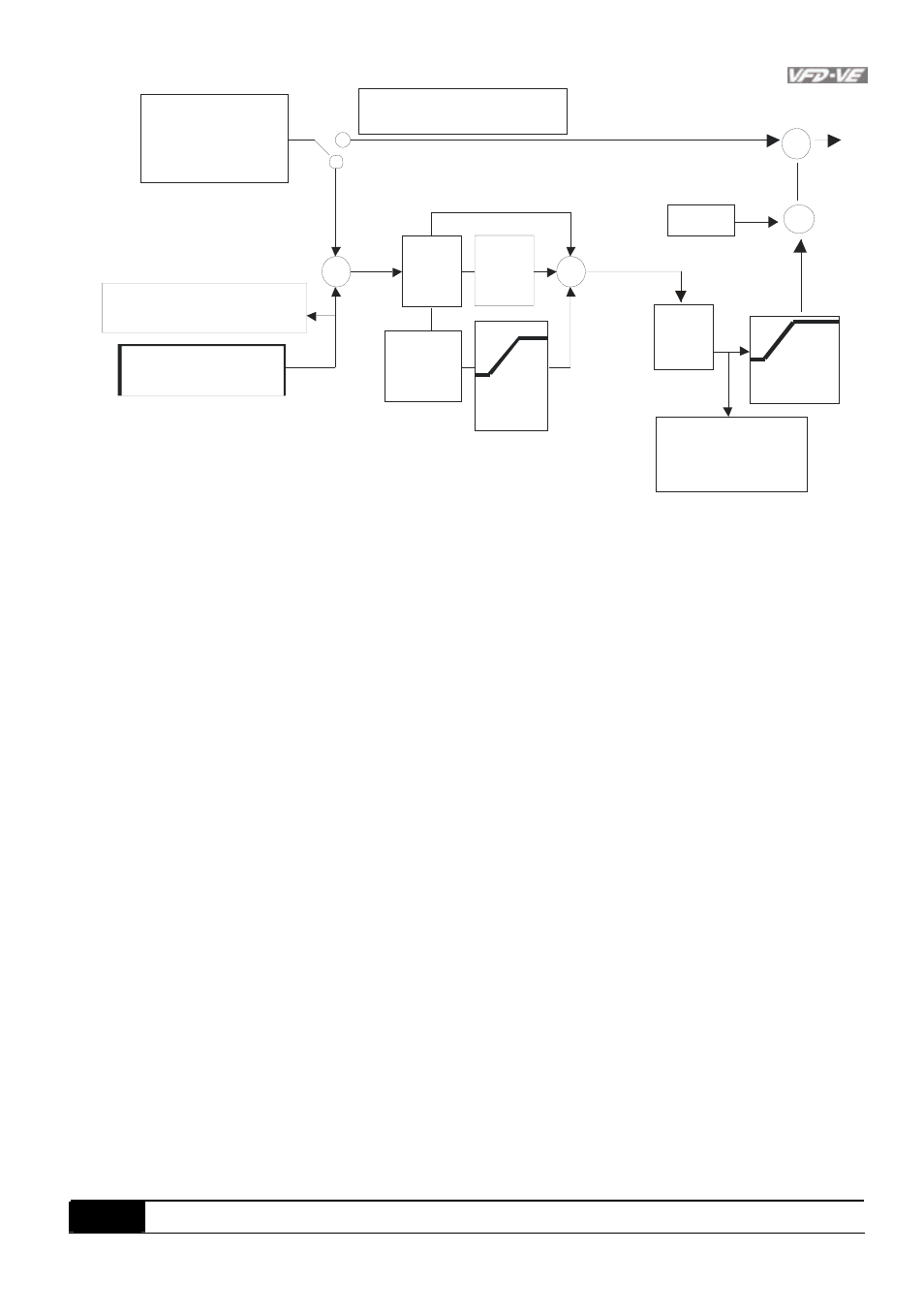
Inp ut Selection
of the PID Fee dback
PID Cancelled
PID Freq.
out put
command
limit
Treatme nt o f t he
Feedback Signal Fau lt
Int egral Time
Proportion
gain
00-14=1 0 display o f t he
PID feed back
Di fferential
Time
00-20:KPV-C E0 1/
RS485
03-00~0 2:
UP/D own
ke y PG
08-00=0
or 02-01~ 06=21(pid off)
08-00:AVI/ACI
AUI /PG
P
08-01
D
08-03
I
08-02
08-04
08-07
If Hz>08 -05
time over0 8-08
=> 08-09
08-05
Output
+
-
+
+
Inp ut Selection of the
PID Targe ted Value
1
2
08-06
PID offset
Display of th e PID fee dback
uppe r limit
for
Int egral
PID
Delay
Time
+
PI Control: controlled by the P action only, and thus, the deviation cannot be eliminated
entirely. To eliminate residual deviations, the P + I control will generally be utilized. And when
the PI control is utilized, it could eliminate the deviation incurred by the targeted value changes
and the constant external interferences. However, if the I action is excessively powerful, it will
delay the responding toward the swift variation. The P action could be used solely on the
loading system that possesses the integral components.
PD Control: when deviation occurred, the system will immediately generate some operation
load that is greater than the load generated single handedly by the D action to restrain the
increment of the deviation. If the deviation is small, the effectiveness of the P action will be
decreasing as well. The control objects include occasions with integral component loads,
which are controlled by the P action only, and sometimes, if the integral component is
functioning, the whole system will be vibrating. On such occasions, in order to make the P
action’s vibration subsiding and the system stabilizing, the PD control could be utilized. In
other words, this control is good for use with loadings with no brake functions over the
processes.
PID Control: Utilize the I action to eliminate the deviation and the D action to restrain the
vibration, thereafter, combine with the P action to construct the PID control. Use of the PID
method could obtain a control process with no deviations, high accuracies and a stable system.
08-08
Feedback Signal Detection Time
Unit: 0.1