Delta Electronics AC Motor Drive VFD-VE Series User Manual
Page 115
Chapter 4 Parameters|
4-66
Revision August 2008, 03VE, SW V2.04
Settings
Functions
Descriptions
MI=d1
Run/Stop
1
1
1010 =10
2
cor responds to
Pr.04- 24
1
1
0
0
0
0
0
1
1
1
1011 =11
2
cor responds
to Pr.04-25
MI=d2
MI=d3
MI=d4
MI=d36
The motor position
is from enc oder feedbac k
and written into the
cor responding multi-
position of ON/O FF
status of MI1 to MI4
(
P r.04-25)
T he motor position
is from enc oder feedbac k
and written into the
cor responding multi-
position of ON/O FF
status of MI1 to MI4
(
P r.04-24)
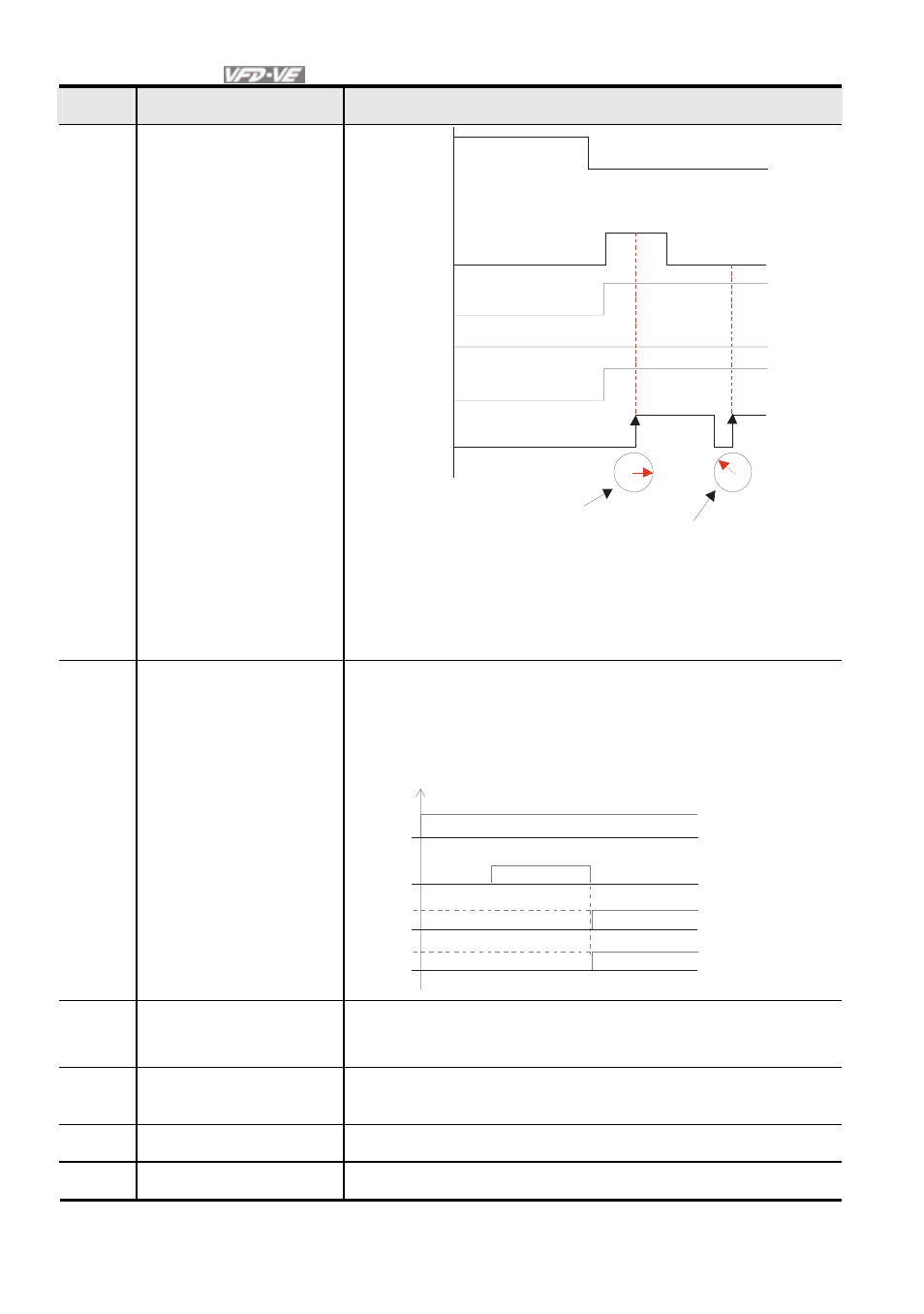
37
Enable pulse position
input command
When this function is enabled, the pulse of PG card will
change from speed command to position command. It is
recommended to set Pr.10-23 to 0.
Example: When it is controlled by pulse (Pr.00-20 is set to 5),
please refer to the following diagram for returning home.
RUN
MI=d35
MO= d5
MI=d37
Time
38
Disable write EEPROM
function
When this function is enabled, you can’t write into EEPROM.
39
Torque command
direction
When the torque command source is AVI or ACI, it can
change torque direction by enabling this function.
40
Force stop
When this function is enabled, the drive will free run to stop.
41
Serial position clock
The position method of the main shaft: