Gains/limits – Rockwell Automation 1398-PDM-xxx IQ Master Version 3.2.4 for IA-2000 and IQ-5000 Positioning Drive Modules, IQ-55 User Manual
Page 61
Parameter Menu • Gains/Limits
39
Publication 1398-PM601A-EN-P — October 2000
MENUS
Gains/Limits
Gains are used to adjust both the velocity and position loop performance. The velocity loop gains
should be set up first, and then the position loop gains can be set. Change gains with care as excessive
settings on any gain can result in motor instability.
After changing any Gain values, choose OK to store the new values and close the dialog box, choose
Update to store the new values, but still leave the Gains/Limits dialog box displayed or choose Cancel
to leave the dialog box without saving changes. The new values are not active until OK or Update is
selected.
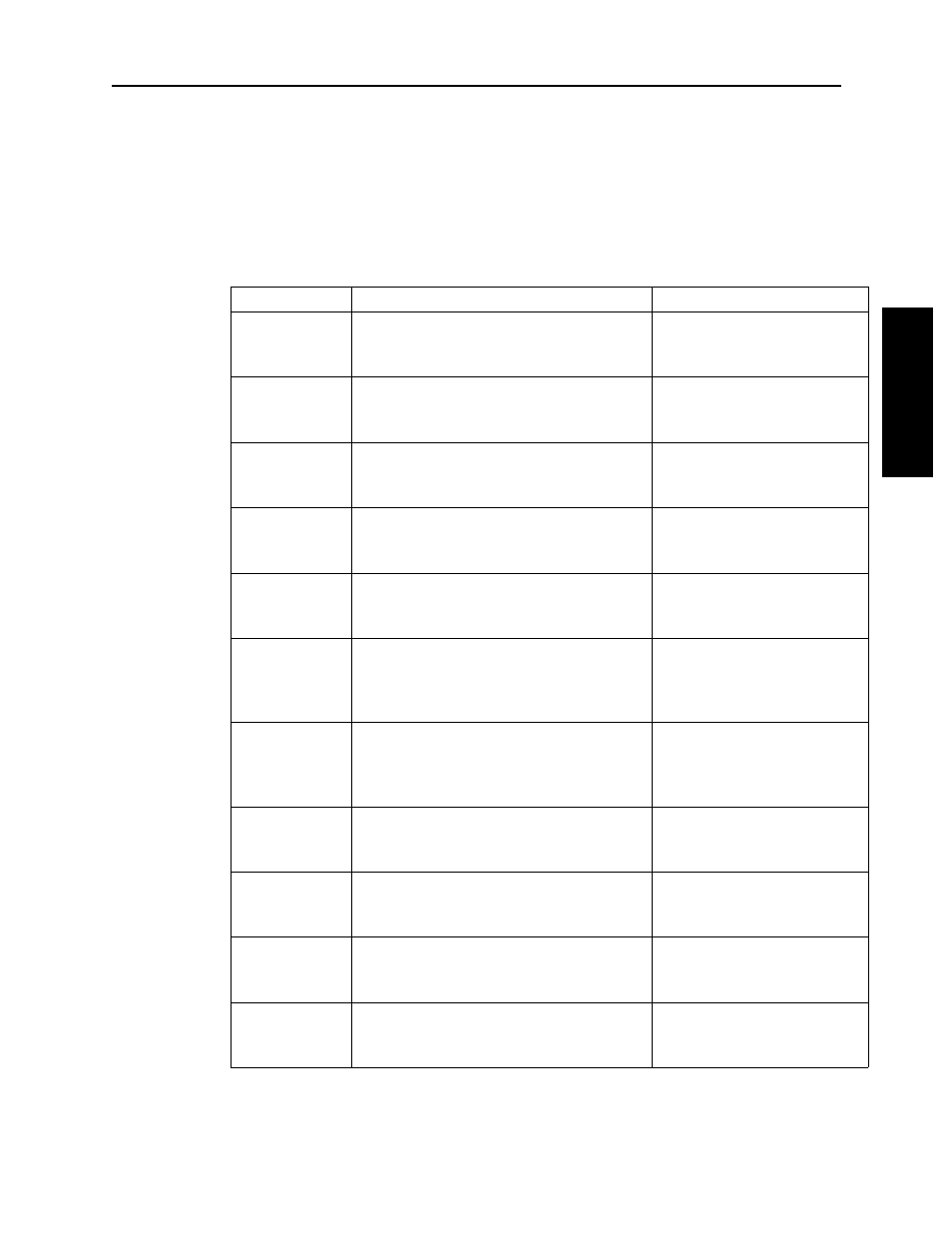
Name
Description
Detail Reference
FILTER
Select the FILTER ON check box to enable
the low pass filter on the output of the
velocity regulator.
Part 5
Language Reference
FILTER
PGAIN
PGAIN is the proportional gain of the
velocity regulator.
Part 5
Language Reference
PGAIN
IGAIN
IGAIN is the velocity regulator integral
gain.
Part 5
Language Reference
IGAIN
FGAIN
FGAIN is the acceleration feedforward
gain.
Part 5
Language Reference
FGAIN
KP
KP is the position regulator proportional
gain.
Part 5
Language Reference
KP
KPZ
KPZ is the position regulator proportional
gain used when the system is within the
region of the commanded position defined
by PZONE.
Part 5
Language Reference
KPZ
PZONE
PZONE is the region around the com-
manded position where the position loop
proportional gain is changed to the gain set
by the KPZ parameter.
Part 5
Language Reference
PZONE
KFF
KFF is the velocity feedforward gain.
Part 5
Language Reference
KFF
KI
KI is the position regulator integral gain.
Part 5
Language Reference
KI
IZONE
IZONE is the region around the com-
manded position where the position loop
integral gain is active.
Part 5
Language Reference
IZONE
In-Position
Window
In-Position Window defines the maximum
position error that is used to determine if the
motor is In-Position.
Part 5
Language Reference
WIN