Flow chart, Appendixes flow chart – Rockwell Automation 1398-PDM-xxx IQ Master Version 3.2.4 for IA-2000 and IQ-5000 Positioning Drive Modules, IQ-55 User Manual
Page 422
400
Application Examples • Lane Diverter
Publication 1398-PM601A-EN-P — October 2000
APPENDIXES
Flow Chart
TITLE "lane_dv2"
;Version 3.00 2/29/96
PGMTYPE = MAINPGM
;
G Variable Assignments
;3 sizes of packages: 0-range1, range1-range2, range2 or
; larger
ASSIGN Range1G1
ASSIGN Range2G2
ASSIGN Gate_pos1
G3
;the first gate position
ASSIGN Gate_pos2
G4
;the second gate position
ASSIGN Gate_pos3
G5
;the third gate position
ASSIGN Min_vel
G6
;the minimum web velocity allowed (in case belt stops)
ASSIGN Deb_dist
G7
;debounce distance: distance package must go before
; looking for a trailing edge
ASSIGN Gate_length G8
;the distance from in_sense to the back of the gate
;
V Variable Assignments
ASSIGN Deb_pos
V1
;position that debounce will be done
ASSIGN Pkg_length1 V2
;the length of the package being sorted
ASSIGN Pkg_length2 V3
;the length of the package being measured
ASSIGN Eon1
V4
;leading edge web position for the package being
; sorted
ASSIGN Eon2
V5
;leading edge web position for the package being
; measured
ASSIGN Target
V6
;the target gate position
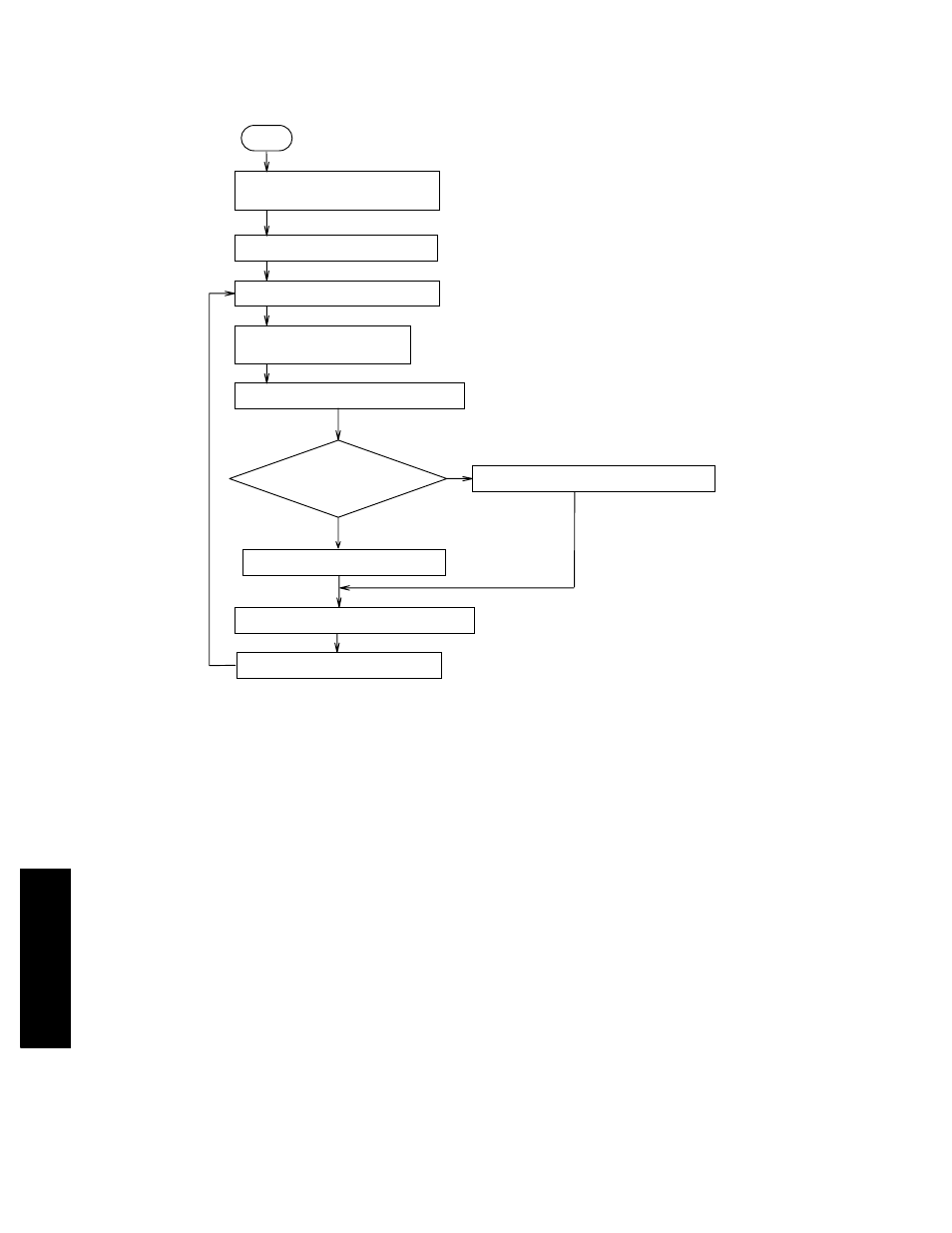
Start
Turn on Package Scan
Turn on Feedrate Override Scan
Wait for all exit sensors to clear
Wait for package to be sensed
Get package parameters
reset Package Scan
Set target according to package size
Calculate velocity using vel2
Calculate velocity using minimum vel2
Wait for package to exit the gate
Vel2 < minimum velocity
?
yes
no
Move to target with calculated velocity