Subroutines and loops, Tutorial – Rockwell Automation 1398-PDM-xxx IQ Master Version 3.2.4 for IA-2000 and IQ-5000 Positioning Drive Modules, IQ-55 User Manual
Page 147
• Subroutines and Loops
125
Publication 1398-PM601A-EN-P — October 2000
TUTORIAL
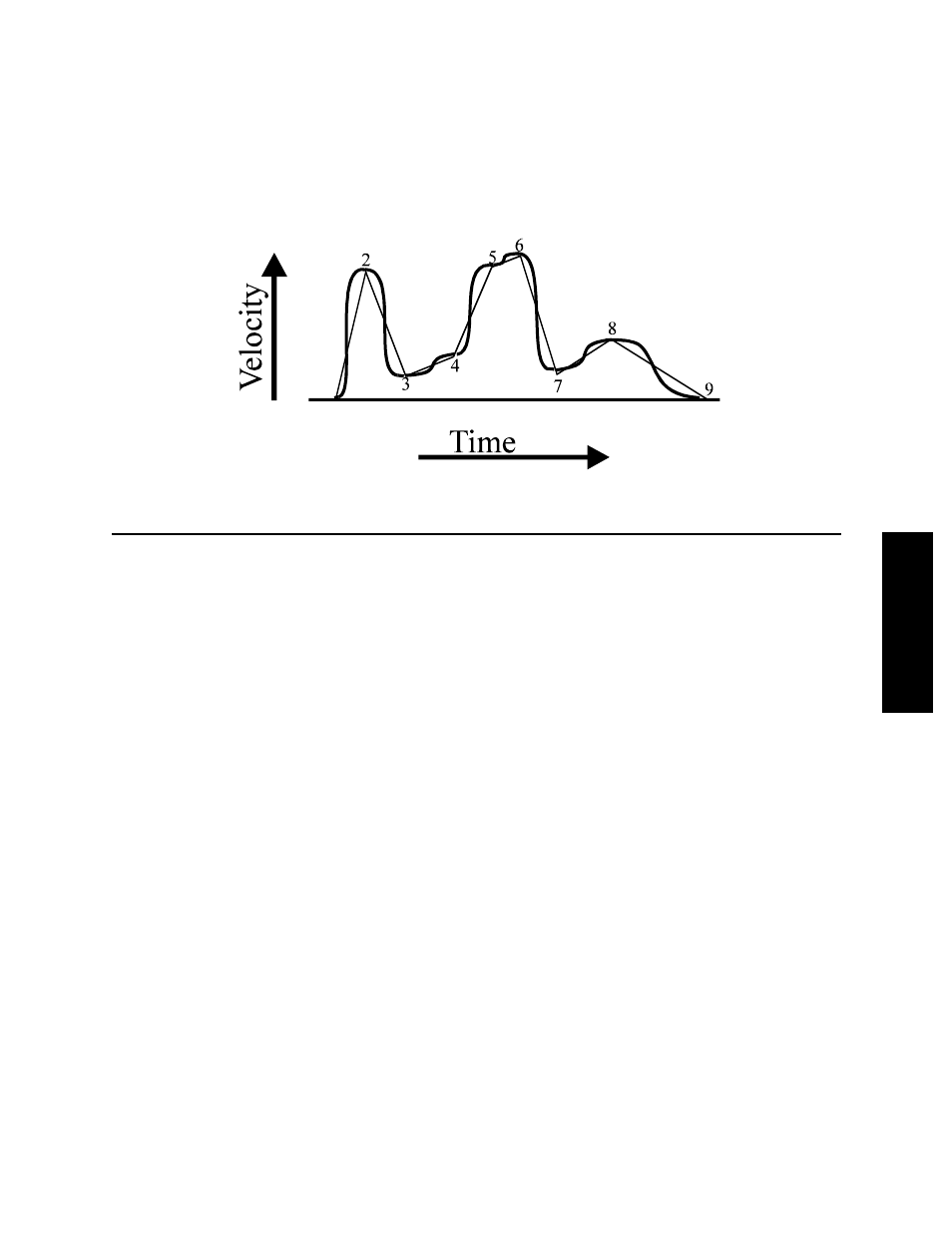
time regardless of which type of acceleration is used.
To use S-Curve acceleration in a D-V stick requires only the addition of an “,S” at the end of the state-
ment. So the first stick in the previous example would be written
D=3,V=56,S
. Modify the previous
motion profile to use S-Curve acceleration. Using S-Curve acceleration on all of the sticks of the previ-
ous example would yield a velocity profile something like this:
Subroutines and Loops
Often it is necessary to repeat a series of steps in several places in a program. Subroutines can be useful
in such situations. The syntax of a subroutine is simple. Subroutines must be placed after the main pro-
gram, must start with
SUB subname
(where
subname
is the name of the subroutine), and must end
with a return (
RET)
. Note that there may be more than one
RET
statement in a subroutine. Subroutines
are called using the
CALL
statement.
Loops are also supported and can be used for actions that need to be repeated more than once.
The following example shows a subroutine called MDS and two types of loops. The MDS subroutine
implements a MOVD command using S-Curve acceleration to accelerate and decelerate. One loop uses
the LOOP command, the other uses an IF-JUMP command and a label.
TITLE "MDSTEST"
ASSIGN dist V1
ASSIGN myloopcnt
V10
myloopcnt = 0
main:
LOOP 20
dist = loopindex/2
CALL MDS
DWELL 0.1
RPT
dist = -Pcmd
CALL MDS
DELAY 2
myloopcnt = myloopcnt + 1
IF myloopcnt < 10 JUMP main
SUB MDS
;S-Curve MOVD subroutine
;This subroutine will do a MOVD of dist units using S-Curve acceleration and ;deceler-
ation.