Motion, Outputs – analog and digital, Motion outputs – analog and digital – Rockwell Automation 1398-PDM-xxx IQ Master Version 3.2.4 for IA-2000 and IQ-5000 Positioning Drive Modules, IQ-55 User Manual
Page 328
306
Variables and Flags Assignment and Request Commands • Motion
Publication 1398-PM601A-EN-P — October 2000
HOST
M
O
D
E
Motion
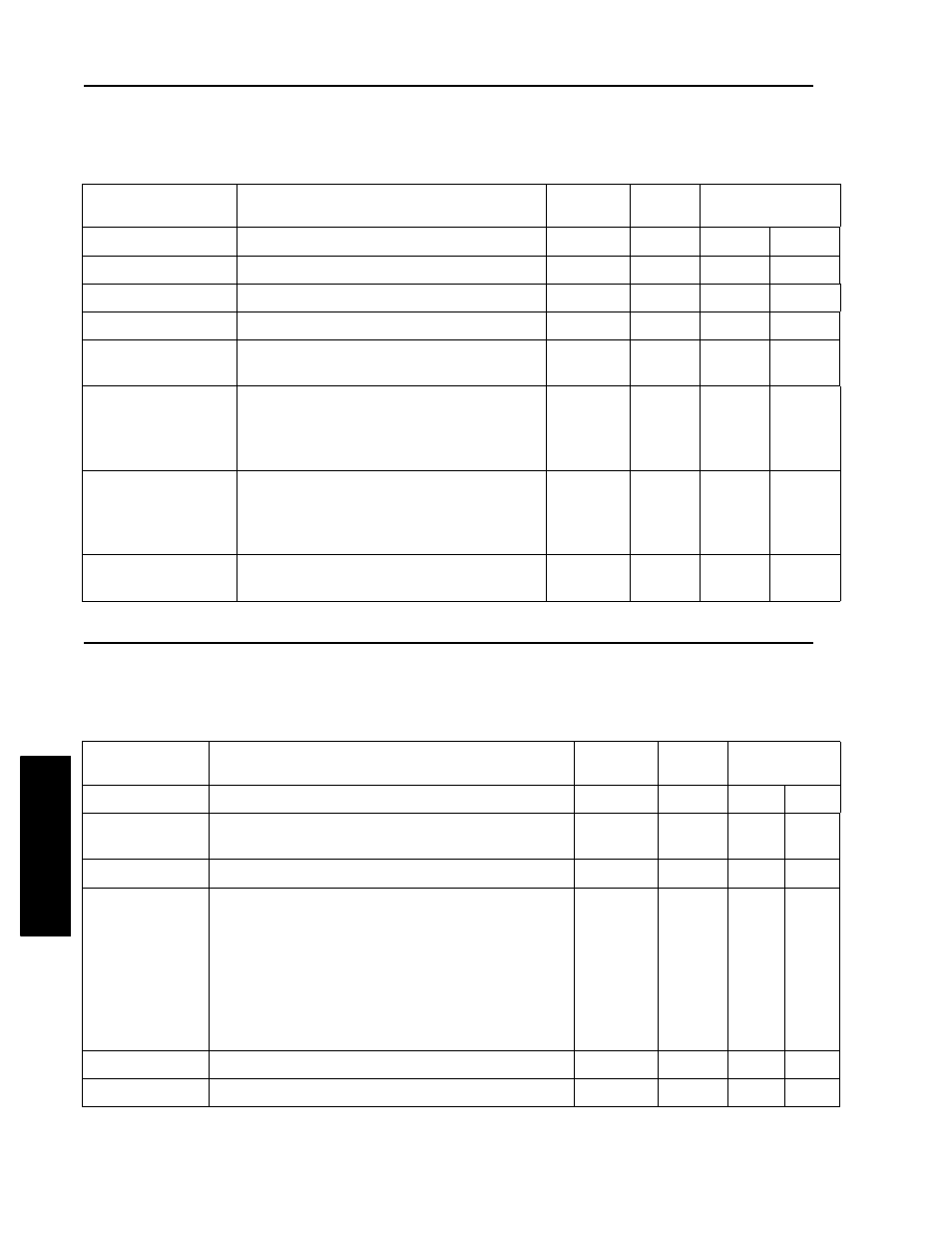
The commands contained in this table are used to control the effect of motion. They do not cause any
motion, they set conditions that affect motion. See also “Motion Execution Commands” on page 295.
Outputs – Analog and Digital
The commands in this table cover all digital and analog outputs including the monitor output and out-
puts located on optional I/O Expansion Cards.
Command
Description
Flag/
Variable
Read/
Write
Personality
Module
GEAR
Current value of the gear ratio.
V
R/W
N
GEAREN
TRUE if the GEAR is enabled.
F
R/W
N
ROTT
Rotation direction for tracking function.
F
R/W
N
SLEW
Limit for output of gear.
V
R/W
Y
#
SLEWEN
Enables the slew rate limit for the gear out-
put.
F
R/W
Y
#
TRACKINGEXT-
POSSELECT
TRUE if the Tracking function applies after
Gear and Slew functions. FALSE if the
Tracking function applies before Gear and
Slew functions.
F
R/W
N
TRACKINGMODE
Sets the mode for the Tracking function:
0 = Off
1 = Ratchet mode
2 = Anti-backlash mode
V
R/W
N
TRACKING-
SYNCED
TRUE if the Tracking function is not dis-
abling follower motion.
F
R
N
Command
Description
Flag/
Variable
Read/
Write
Personality
Module
ATHOME
TRUE to enable At Home output.
F
R/W
Y
DAC1
Default DAC1 output value. (Note that the runtime
value of DAC1 is write only.)
V
R/W
Y
#
DISERR
TRUE for ERROR output ON when disabled.
F
R/W
Y
ERLY
TRUE if the DRIVE ENABLED relay is closed. The
status of these relays are normally handled internally
and these commands are used only in diagnostics
modes. The PLC logic of the drive should be disabled
(XPLC TRUE) before directly accessing either of
these relays.
Note: The relay status is available in the S (status)
command.
F
R
N
ERREN
TRUE to enable ERROR output.
F
R/W
Y
IPEN
TRUE to enable In-Position output.
F
R/W
Y