Words – Rockwell Automation 1398-PDM-xxx IQ Master Version 3.2.4 for IA-2000 and IQ-5000 Positioning Drive Modules, IQ-55 User Manual
Page 212
190
Language Reference • Reference
Publication 1398-PM601A-EN-P — October 2000
WORDS
Remarks
The acceleration or deceleration for the move is calculated based on the specified dis-
tance, starting velocity, and final velocity. The final velocity of one segment become
the starting velocity of the next segment There is no limit to the number of stick moves
in a profile, other than available memory, but the final move in the profile should
return the velocity to 0.
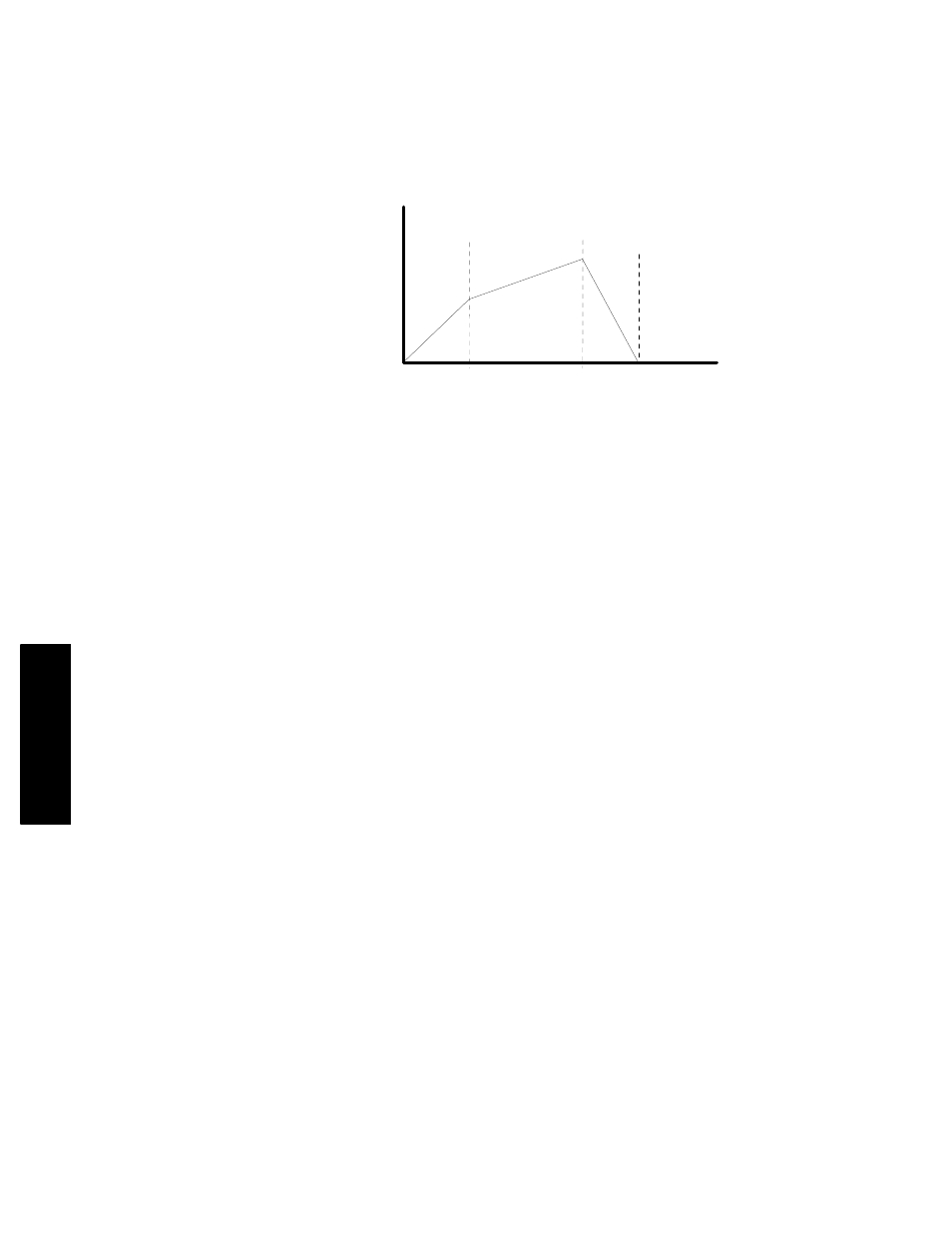
The figure above represents a three segment (stick) move. The first segment has a
starting velocity of 0 and final velocity of 2. This velocity is reached by the time the
motor travels 1 unit of distance. The second stick starts at a velocity of 2 and acceler-
ates to a velocity of 3 while traveling a distance of 4. The final stick starts at a velocity
of 3 and decelerates to a stop while traveling a distance of 2. The instructions to make
this move are:
D = 1, V = 2
D = 4, V = 3
D = 2, V = 0
The following equation can be used to calculate the acceleration that results from a
stick move.
The program will stop executing at this instruction line until the commanded position
has gone the specified distance.
The DV statement can only be used in a subroutine or the main body of the program. It
may not be used in Fkey, Xkey, or Scanned Event routines.
See Also
MOVD, MOVP, MOVV, DIF
Example
D = .5, V = 150
D = 11, V = 150
D = .5, V = 0, S
D = V1, V = V2
Time
D=1,V=2
D=4,V=3
D=2,V=0
Position=1
Position=5
Position=7
Velocity
Accel
V
2
f
V
2
o
–
〈
〉
2D
----------------------------
=
V
f
FinalVelocity
≡
V
o
StartingVelocity
≡
D
Dis
ce
tan
≡