Stick moves, Tutorial – Rockwell Automation 1398-PDM-xxx IQ Master Version 3.2.4 for IA-2000 and IQ-5000 Positioning Drive Modules, IQ-55 User Manual
Page 145
• Stick Moves
123
Publication 1398-PM601A-EN-P — October 2000
TUTORIAL
IF POSN > Maxdist
INBAND = OFF
ELSE
INBAND = ON
}
S1 CONT
MOVP = 0,V = 300
VEL = 150
MAIN: MOVD = 10
MOVD = -9.1
IF POSN < 7 JUMP MAIN
END
The first line of the Scanned Event is a condition that will always be true: IF F1=F1. This means the
Scanned Event action will always be executed. The action, in this case, is actually a block of code. A
block of code is signified by placing curly braces, {}, around the code and can be used anywhere a sin-
gle statement can be used. The code inside the braces, two IF-ELSE statements, could be translated as:
if POSN is less than G1, turn O1 OFF; otherwise (ELSE) check to see if POSN is greater than G2. If it
is, turn O1 OFF, if it is not, turn O1 ON. Change the program and run it as before.
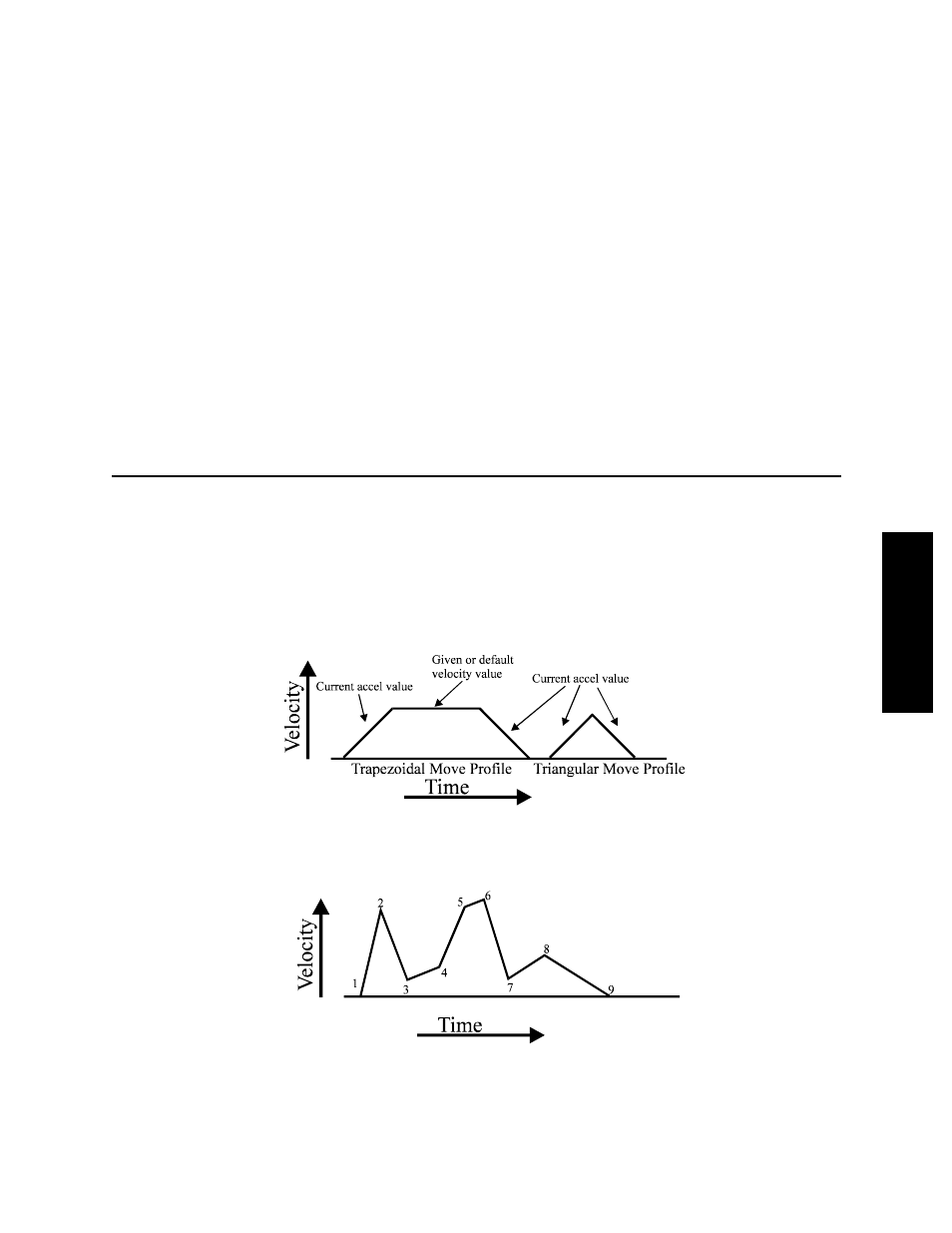
Stick Moves
MOVD and MOVP commands generate what is called a trapezoidal motion profile: the motor is accel-
erated using the current acceleration setting to a given or default top speed and then decelerated at the
right time to arrive at the desired position. If the distance to be moved is fairly small, a triangular move
profile will be used: the motor will accelerate for half the move and decelerate for the other half of the
move, but never reach the given or default velocity.
MOVD and MOVP commands are simple and useful, but if the required move profile is more complex
than a simple trapezoid, DV (stick) moves can be used.
The profile shown above can be broken up into 8 DV moves. The first stick would define the distance
between point 1 and point 2 and the velocity at point 2. So, if the distance between points 1 and 2 was 3
units and the velocity at point 2 was 56 RPM, the command would be:
D=3,V=56
. The second stick
would give the distance between point 2 and point 3 and the velocity at point 3, and so on. Any profile