Rockwell Automation 1398-PDM-xxx IQ Master Version 3.2.4 for IA-2000 and IQ-5000 Positioning Drive Modules, IQ-55 User Manual
Page 160
138
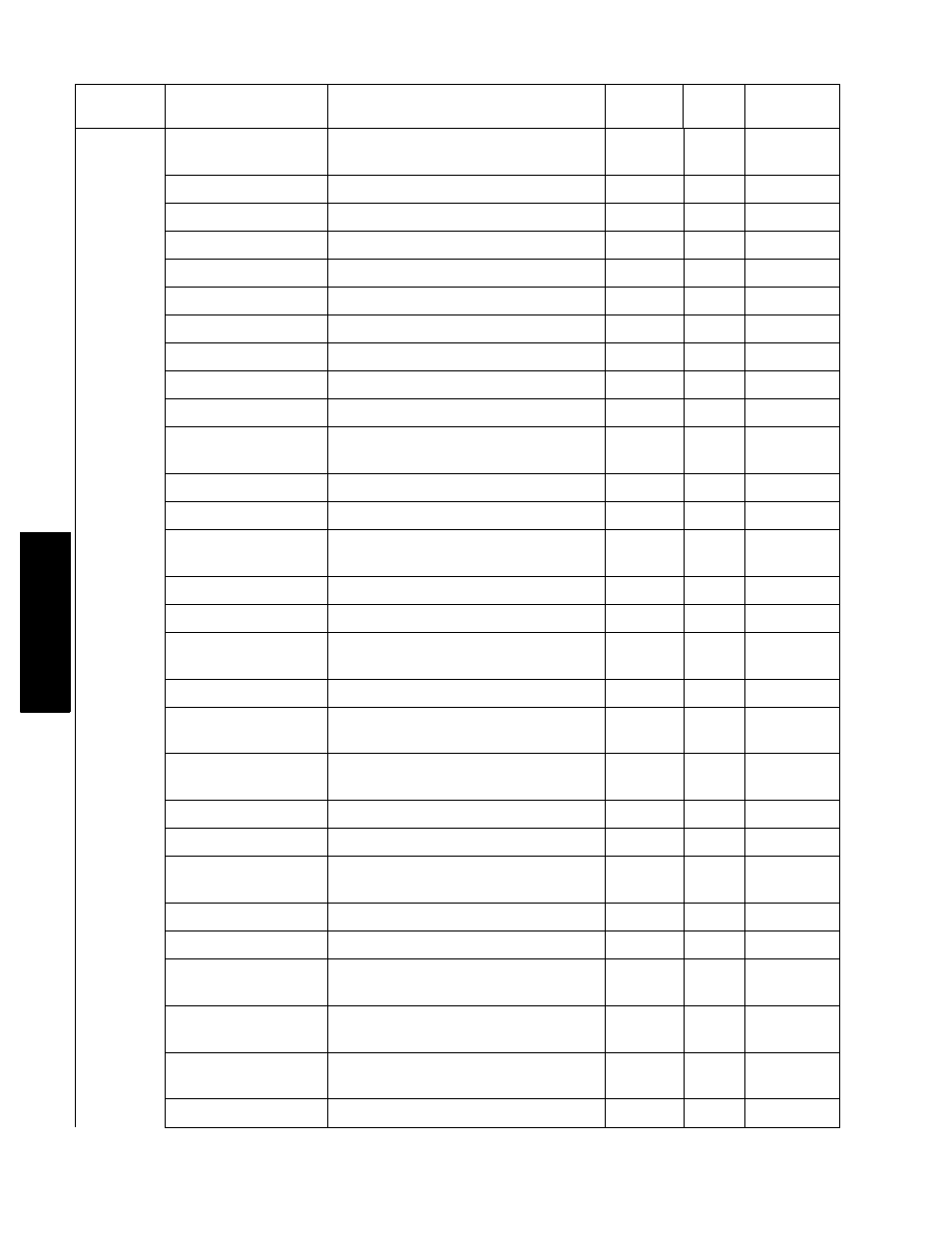
System Variables & Flags • Variable and Flag Summary
Publication 1398-PM601A-EN-P — October 2000
TUTORIAL
System
(cont.)
DHCMD
Defines the present position as the home
(zero) position
F
R/W
N
DISLIM
Temporarily disables hardware limits
F
R/W
N
EFLAG
Flag to indicate if an error is active
F
R
N
ENUM
Error number
V
R
N
FDR
Feedrate value
V
R/W
N
FEL
Following Error Limit
V
R/W
Y
FET
Following Error Time
V
R/W
Y
FNPGM
Start an Fkey program
V
R/W
N
FNVAR1
Fn routine volatile variable 1
V
R/W
N
FNVAR2
Fn routine volatile variable 2
V
R/W
N
FOUNDHOME
Used by the home program to tell sys-
tem that the home position was found
F
R/W
N
HLIMITS
Set if limit inputs enabled
F
R
Y
HRESET
Causes a hardware reset
F
W
N
INDEXEN
Used to tell the home program to use the
encoder index
F
R
Y
INPOSN
In-position
F
R
N
JOGACTIVE
Job motion is active
F
R
N
JOGF
Simulates pressing the forward jog
input
F
R/W
N
JOGR
Simulates pressing the reverse jog input
F
R/W
N
LOOPINDEX
The LOOP counter for the LOOP
instruction
V
R/W
N
MONOUT
The number of the currently active vari-
able for the monitor analog output
V
R/W
Y
MOVECOMPLETE
Profile generated motion is active
F
R
N
MVOEN
Monitor Velocity Output enabled
F
R/W
N
OTMON
Display monitor variables on the top
line
V
R/W
N
OVERSPEED
Set the overspeed fault trip point
V
R/W
Y
PAUSE
Simulates pressing the pause input
F
R/W
N
PCAMACTIVE
Flag to indicate PCam position is
changing
F
R
N
PEXTACTIVE
Flag to indicate Pext position is chang-
ing
F
R
N
PGMNUM
Specifies which program will execute
when STARTP is executed
V
R/W
N
PGMRUNNING
Indicates a main program is running
F
R
N
Type
Name Description
Flag/
Variable
Read/
Write
Personality
Module