Rockwell Automation 1398-PDM-xxx IQ Master Version 3.2.4 for IA-2000 and IQ-5000 Positioning Drive Modules, IQ-55 User Manual
Page 290
268
Language Reference • Reference
Publication 1398-PM601A-EN-P — October 2000
WORDS
Remarks
Use the SLEW limit to limit the maximum acceleration of a motor that is geared to the
input from encoder 2. If the acceleration of the master motor would result in an accel-
eration on the follower that is greater then the slew limit, the command would be
“clipped” to slew limit.
If the acceleration is clipped, the following axis will not track the encoder input
exactly. For example: A gear ratio of 1 and a SLEW limit of 100 rev/s/s is established.
If the master turns one revolution the follower will turn one revolution (if the accelera-
tion limit of 100 rev/s/s is not exceeded).
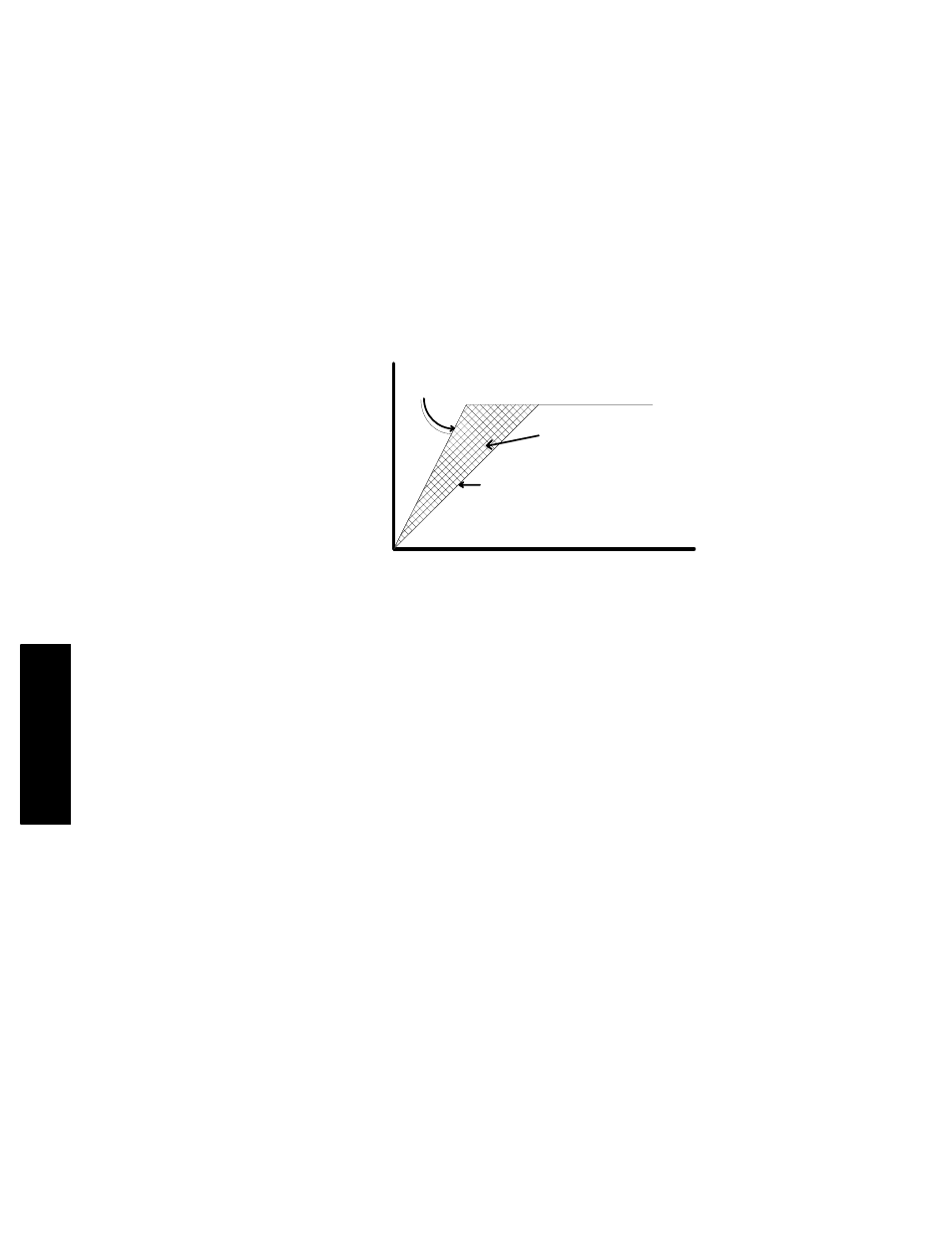
Should the master exceed this limit, the follower will clip its acceleration to 100revs/s/
s. At the end of 1 revolution of the master, the follower will stop at a distance less than
1 revolution. The diagram below illustrates this concept. The shaded area represents
the difference in ideal position and the position that results because of the limit placed
on the acceleration of the follower.
The SLEW limit is frequently used when the follower starts following a master that is
already moving. If the master is moving and a gear is enabled with no SLEW limit set,
the follower will use maximum acceleration to come up to speed. This can cause
excessive wear on most machines and potentially damage equipment. If a SLEW limit
has been set, the follower will use this acceleration rate to come up to the speed of the
master
Changes made to this variable by a program are only in effect while the program is
running. When the program ends it will return to the value stored in the Personality
Module. If no change is made to this variable by the program, the value in the Person-
ality Module is used. The value in the Personality Module is set in the Parameter
menu, Velocity/Accel dialog box.
See Also
GEAR, SLEWEN
Example
SLEW = 500
Slew limited Acceleration
Commanded Acceleration
Difference in master position
and follower position.
Time
Velocity
Difference = (GPOS - PEXT)