Acceptable deceleration distance), ch, Home switch active in the opposite sense – Rockwell Automation 1398-PDM-xxx IQ Master Version 3.2.4 for IA-2000 and IQ-5000 Positioning Drive Modules, IQ-55 User Manual
Page 369
System Programs • System Program 25 - Home
347
Publication 1398-PM601A-EN-P — October 2000
APPENDIXES
Home Switch Active in the Opposite Sense
If only the Home to Encoder Index is selected, the axis will move at the creep speed in the direction set
by the Home Velocity parameter until it sees an index. The index position will be the basis of the offset
move.
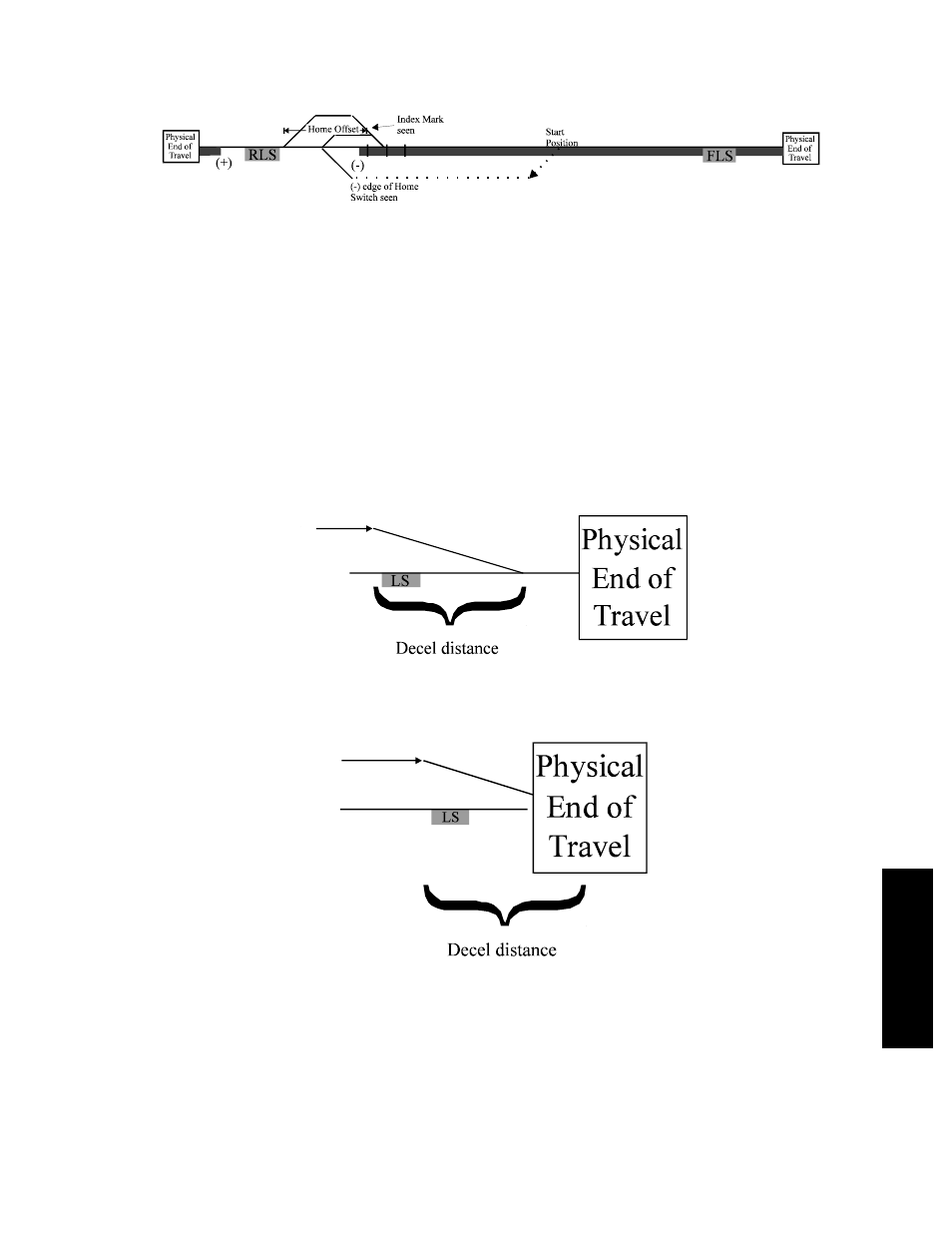
The figures Acceptable Deceleration Distance and Deceleration Distance Resulting in an Axis Crash
show the interaction of the Acceleration parameter and the physical placement of the forward and
reverse limits. The standard home program uses the default system acceleration to accelerate and decel-
erate. The lower this value, the longer the deceleration distance. If the limit switches are placed too
close to the physical end of travel, a crash could occur during the home cycle, as illustrated in Decelera-
tion Distance Resulting in an Axis Crash. The deceleration distance (in user units) is the Home Velocity
squared (units
2
/second
2
) divided by twice the acceleration parameter (units/second
2
): d = V
2
/2a. If your
Timebase is set to minutes, divide the Home Velocity by 60 before using this formula.
Acceptable Deceleration Distance
Deceleration Distance Resulting in an Axis Crash