Feedrate, Dwell statement, Delay statement – Rockwell Automation 1398-PDM-xxx IQ Master Version 3.2.4 for IA-2000 and IQ-5000 Positioning Drive Modules, IQ-55 User Manual
Page 182: Motion instruction summary
160
Motion • Feedrate
Publication 1398-PM601A-EN-P — October 2000
TUTORIAL
plished by executing a MOVD. The MOVD command will cause the motor to move by the specified
distance relative to the encoder while following the encoder.
Feedrate
Feedrate (FDR) scales the timebase for motion. With the feedrate set at 100%, all velocities and
DWELLs are at the programmed rates. Feedrate can be set to less than 100% to slow down a process, or
above 100% to speed it up. Feedrate can be changed at any time in the program and is entered as a per-
centage with a range of 0 to 200.
Feedrate will affect MOVD, MOVP, MOVV, DIF, DV, and DWELL instructions. The velocity, acceler-
ation, and time in these functions will be scaled by the FDR percentage.
For example, if the velocity is set to 3,000 RPM and the FDR is set to 50, any motion will have a veloc-
ity that is 50% of 3,000 RPM or 1,500 RPM (3000 * 0.5 = 1500). A DWELL time is also scaled by
FDR. A DWELL of 10 seconds would be scaled to 20 seconds (10 / 0.50 = 20). A feedrate can also be
set with the analog input. This is accomplished by assigning the analog input to FEEDRATE in the
Parameter Inputs dialog box.
Changes made to this variable by a program are only in effect while the program is running. When the
program ends, feedrate will return to the value stored in the Personality Module. If no change is made to
this variable by the program, the value in the Personality Module is used. The value in the Personality
Module is set in the Parameter menu.
Dwell Statement
The DWELL statement will cause the program to stop for the specified amount of time. The time will
be scaled by the feedrate system variable discussed above.
Delay Statement
The DELAY statement will cause the program to stop for the specified amount of time. The time will
NOT be scaled by the feedrate system variable.
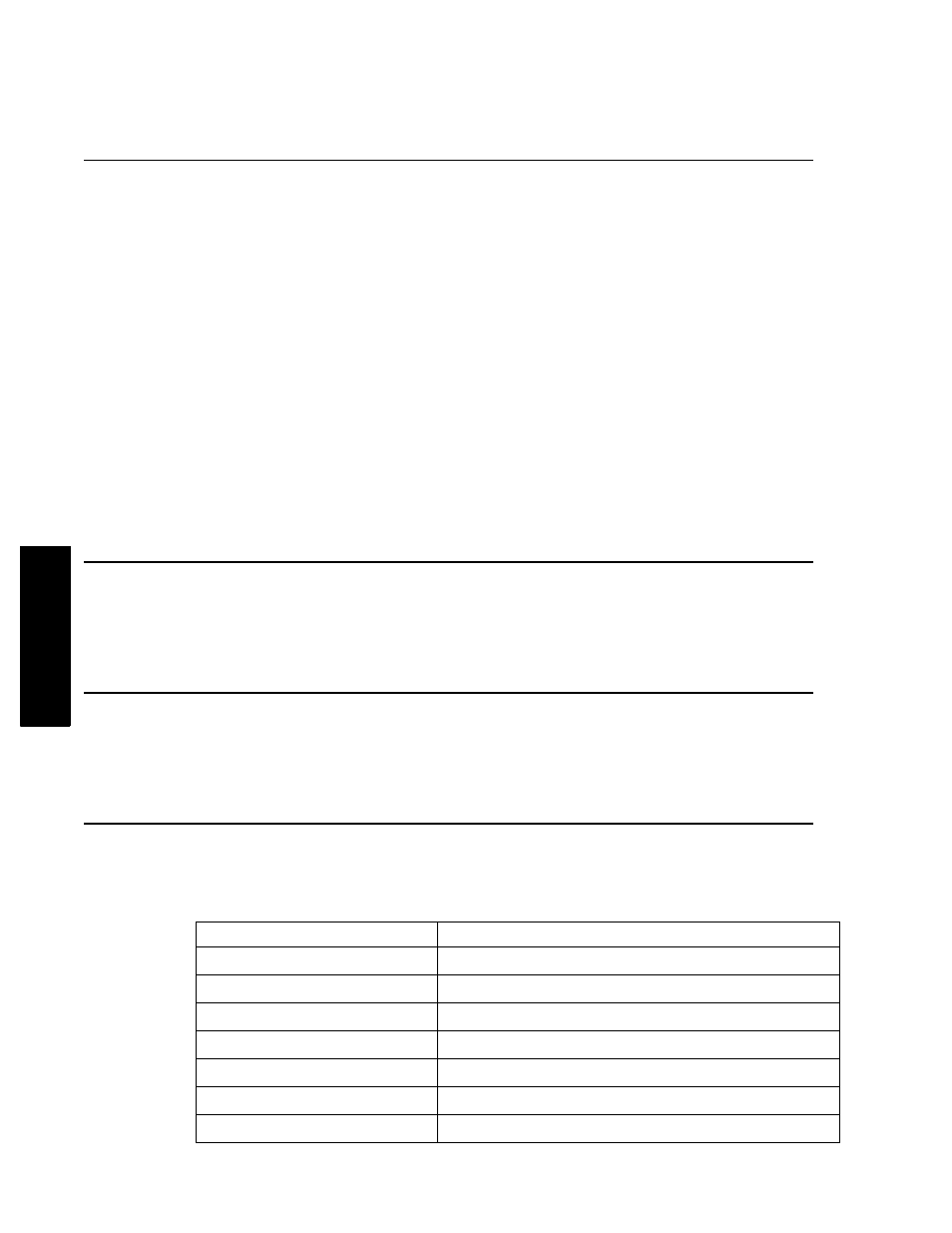
Motion Instruction Summary
The following is a summary of the commands that can be used to generate motion. Refer to Part 5
•
Language Reference for more detailed information.
Name
Description
D = dist, V = vel [, S]
Define one linear segment of a move
DELAY = time
Delay for a specified time (not affected by feedrate)
DIF = dist, cond, JUMP label
Move until the distance is reached or the condition occurs
DWELL = time
Dwell for the specified time (affected by feedrate)
FDR
Adjust the feedrate for motion from 0% to 200%
GEAR = value
Set the gear ratio
GEAREN = ON/OFF
Enable/Disable gearing