Rockwell Automation 2094-EN02D-M01-Sx Kinetix 6200 and Kinetix 6500 Modular Multi-axis Servo Drives User Manual User Manual
Page 87
Rockwell Automation Publication 2094-UM002E-EN-P - May 2012
87
Kinetix 6200 and Kinetix 6500 Connector Data
Chapter 4
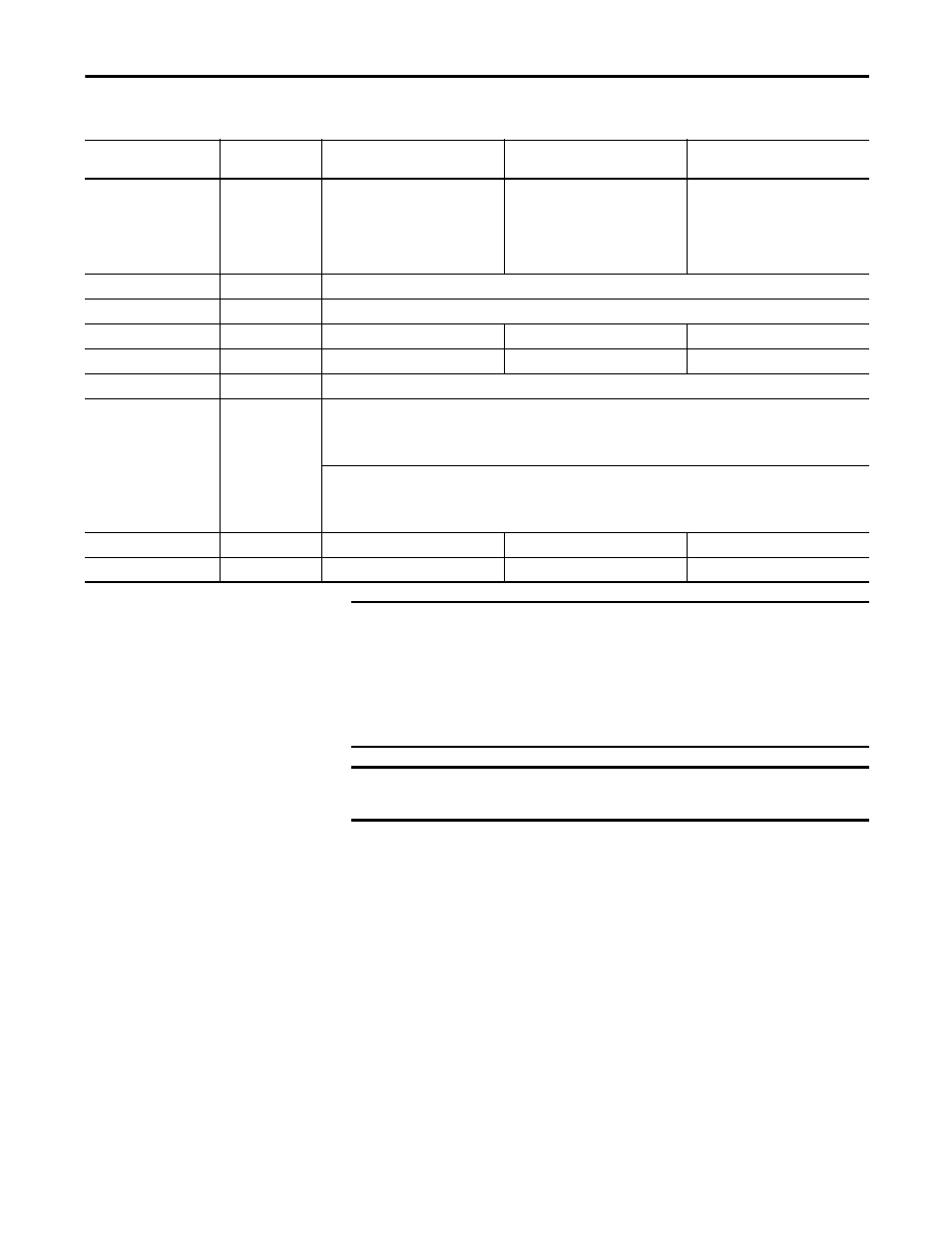
Table 43 - Support Requirements for EnDat Encoders on Third-party Motors
Requirement
EnDat 2.1
(digital only)
EnDat 2.1
(with sine/cosine)
EnDat 2.2
(digital only)
EnDat 2.2
(with sine/cosine)
Supported models
–
ECI1319 / EQI1331
ECI1118 / EQI1130
LC483
LIC4000
ECN125
ROQ437
ECN1123 / EQN1135
ECN1325 / EQN1337
ECN113
ECN1313 / EQN1325
ECN413 / EQN425
ROQ425
Cable length, max
–
50 m (164 ft)
Position initialization
–
Digital
Position tracking
–
Uses sine/cosine signals
Digital
Uses sine/cosine signals
Cabling
–
Shielded, twisted pair
Heidenhain EnDat 2.2 cable only
Shielded, twisted pair
Blob programming
–
Not required
Commissioning/
field replacement
–
Kinetix 6200 or Kinetix 6500 drives:
A one-time procedure must be executed via message instructions to program the blob file in the encoder (using a Kinetix 6500
drive) so that it can be operated like any other Rockwell Automation motor. This is similar to the Stegmann encoder third-party
motor requirement, except that a Kinetix 6500 drive is used instead of a Kinetix 6000 drive.
Kinetix 6500 drives only:
The RSLogix 5000 software commutation test procedure (released with version 19) must be executed to obtain the
commutation offset value and store it in the controller. This procedure must be executed any time a drive is connected to a new
motor.
Data frequency
–
100 kHz
4.125 MHz
100 kHz
Sine/cosine frequency
–
0…250 kHz
–
0…250 kHz
IMPORTANT
To properly support system EnDat feedback, the keying configuration on the
drive Module Properties tab of RSLogix 5000 software must be selected to the
correct firmware revision as follows:
• For EnDat 2.1 encoders, use Kinetix 6200 drive firmware revision 1.35 or
later
• For EnDat 2.2 encoders, use Kinetix 6200 drive firmware revision 1.40 or
later
IMPORTANT
To make sure your drive and motor integration is successful, refer to
commissioning notes relative to Endat encoders on third-party motors.