Rockwell Automation 2094-EN02D-M01-Sx Kinetix 6200 and Kinetix 6500 Modular Multi-axis Servo Drives User Manual User Manual
Page 86
86
Rockwell Automation Publication 2094-UM002E-EN-P - May 2012
Chapter 4
Kinetix 6200 and Kinetix 6500 Connector Data
Table 41 - EnDat 2.1 Interface Specifications
Refer to
page 82
for the EnDat sine/cosine interface schematic. It is identical to
the Stegmann Hiperface (MTR_SIN and MTR_COS) schematic.
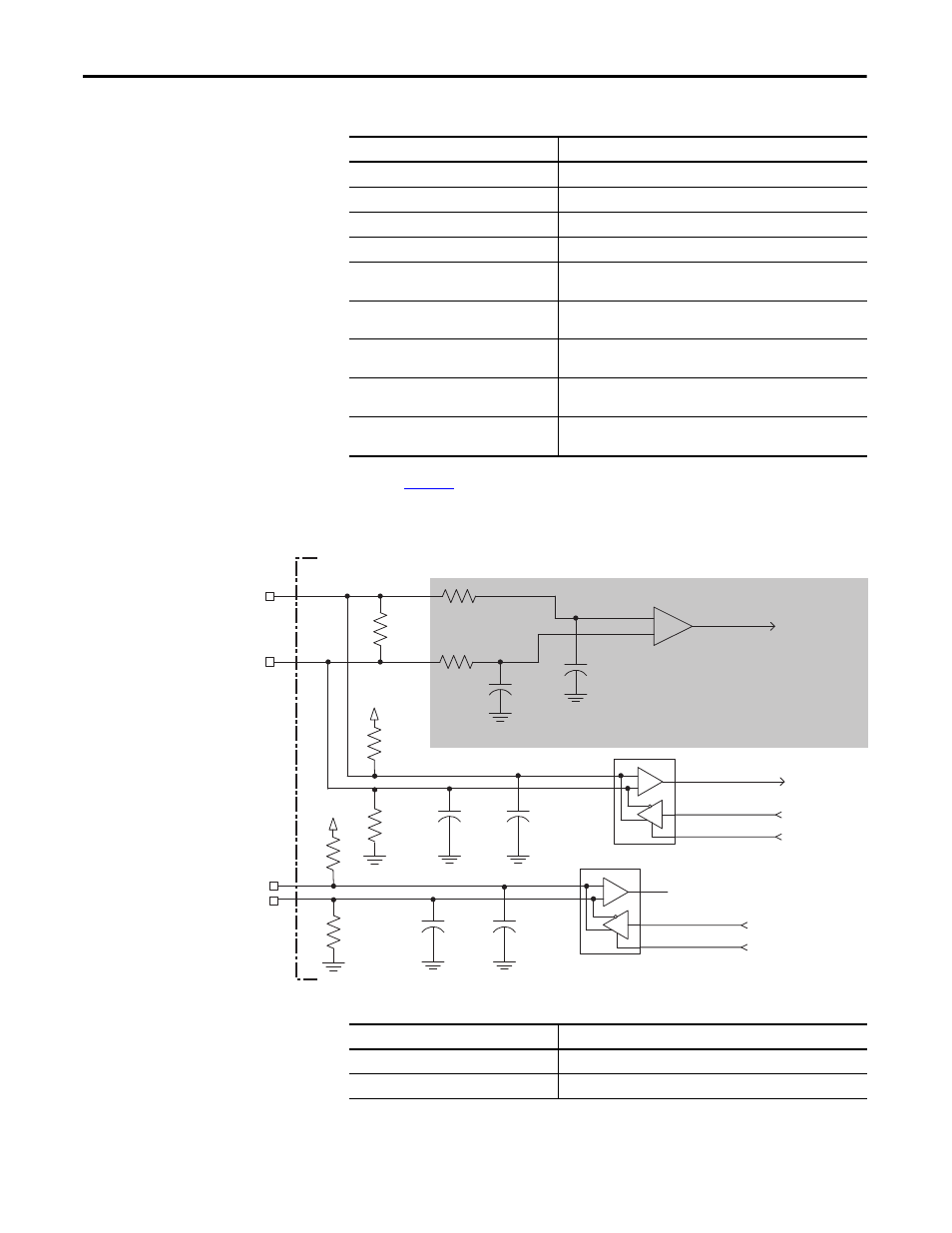
Figure 46 - EnDat 2.1 and EnDat 2.2 Interface Schematic for Serial Communication
Table 42 - EnDat 2.2 Interface Specifications
Attribute
Value
Protocol
EnDat 2.1
Memory support
Unprogrammed
EnDat 2.1 data communication
4 Mbps, synchronous
Sine/Cosine interpolation
2048 counts/sine wave period
Input frequency
(MTR_SIN and MTR_COS)
250 kHz, max
Differential input voltage
(MTR_SIN and MTR_COS)
0.6…1.2V, p-p
Line loss detection
(MTR_SIN and MTR_COS)
Average (sin
2
+ cos
2
) > constant
Noise filtering
(MTR_SIN and MTR_COS)
Two-stage coarse count pulse reject filter with rejected pulse tally
Incremental position verification
Position compare between incremental accumulator and serial data
performed every 50 ms or less.
Shaded area indicates components that are part of the circuit, but support
other feedback device types (not used for EnDat support).
Kinetix 6200 or Kinetix 6500
Control Module
Attribute
Value
Memory support
Unprogrammed
EnDat 2.2 data communication
4 Mbps, synchronous