Rockwell Automation 2094-EN02D-M01-Sx Kinetix 6200 and Kinetix 6500 Modular Multi-axis Servo Drives User Manual User Manual
Page 137
Rockwell Automation Publication 2094-UM002E-EN-P - May 2012
137
Connecting the Kinetix 6200 and Kinetix 6500 Drive System
Chapter 5
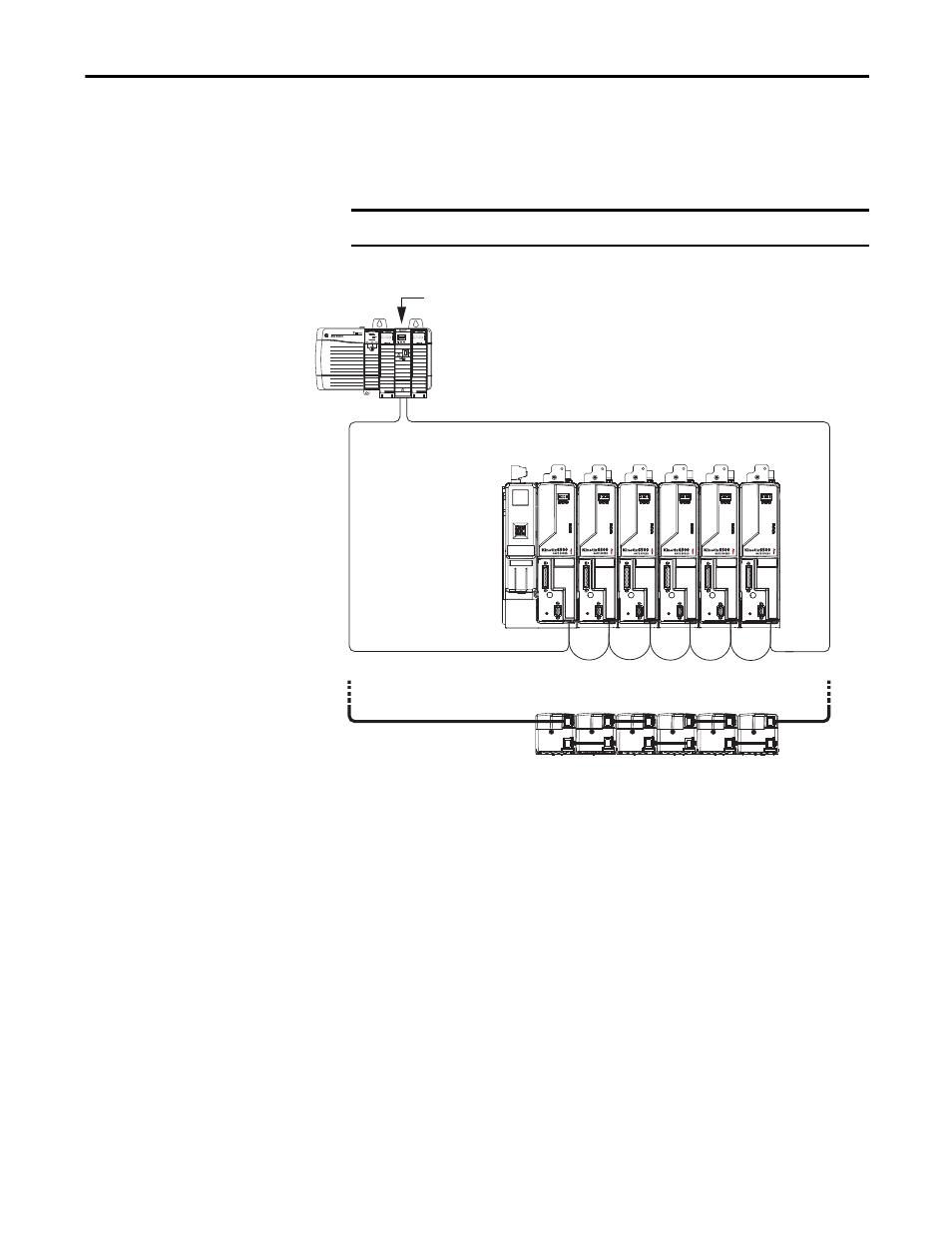
In this example, the drives are connected by using device-level ring (DLR)
topology. DLR topology is fault redundant. For example, if a device in the ring is
disconnected, the rest of the devices in the ring continue to maintain
communication.
Figure 83 - Ethernet Wiring Example - DLR Ring
IMPORTANT
DLR topology requires the dual-port 1756-ENxTR module.
PORT 2
PORT 1
ControlLogix Platform
Kinetix 6500 Modular Multi-axis Servo Drive System
1585J-M8CBJM-x Ethernet (shielded) Cable
1756-ENxTR EtherNet/IP Module
2094-EN02D-M01-Sx Control Modules (bottom view)
Kinetix 6500
Drive System
1585J-M8CBJM-OM3
0.3 m (1.0 ft) Ethernet Cable