Rockwell Automation 2094-EN02D-M01-Sx Kinetix 6200 and Kinetix 6500 Modular Multi-axis Servo Drives User Manual User Manual
Page 82
82
Rockwell Automation Publication 2094-UM002E-EN-P - May 2012
Chapter 4
Kinetix 6200 and Kinetix 6500 Connector Data
Table 37 - Stegmann Hiperface Specifications
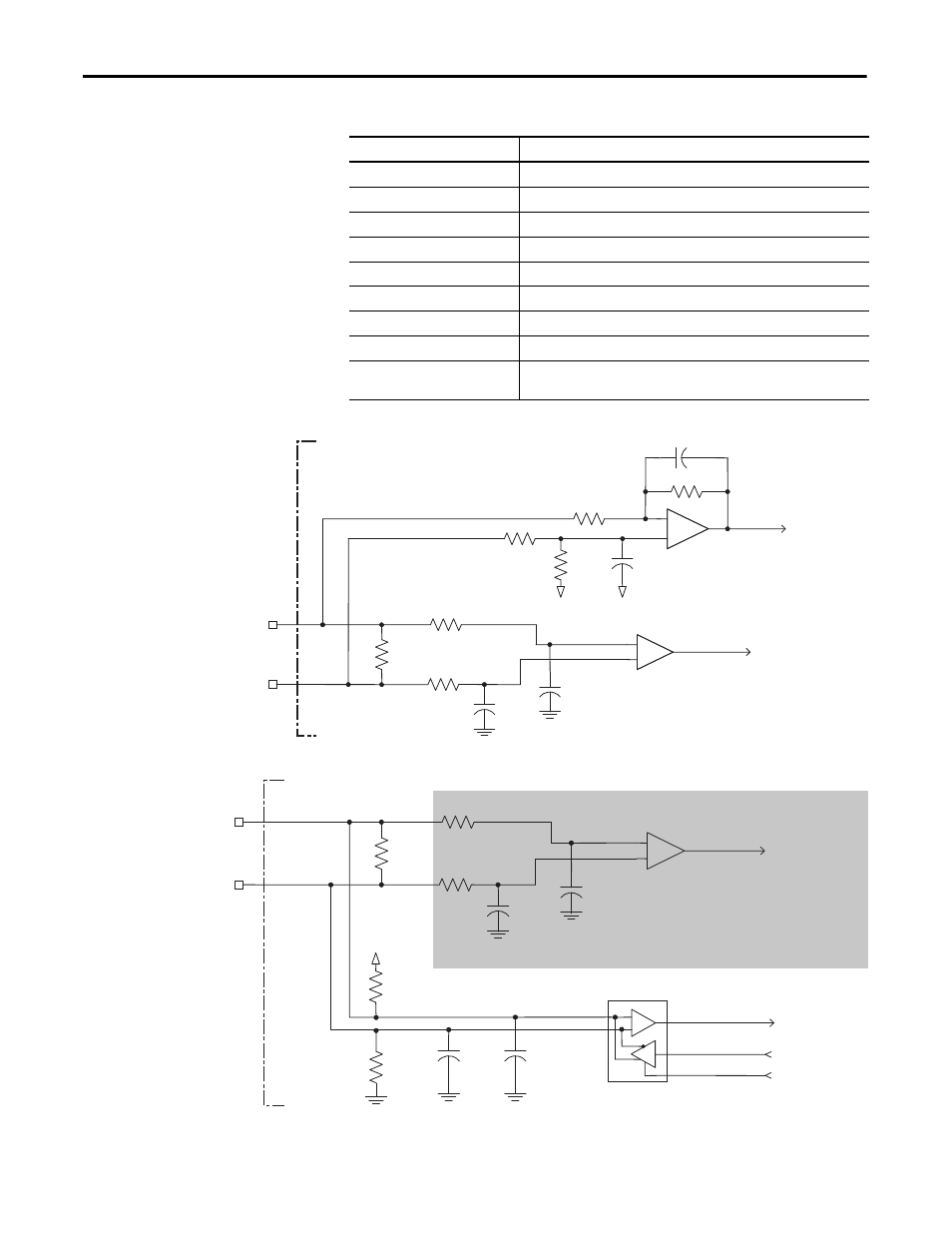
Figure 41 - Stegmann Hiperface Interface, MTR_SIN and MTR_COS Signals
Figure 42 - Stegmann Hiperface Interface, MTR_DATA Signals
Attribute
Value
Protocol
Hiperface
Memory support
Not programmed, or programmed with Allen-Bradley motor data
Hiperface data communication
9600 baud, 8 data bits, no parity
Sine/cosine interpolation
2048 counts/sine period
Input frequency (AM/BM)
250 kHz, max
Input voltage (AM/BM)
0.6...1.2V, p-p, measured at the drive inputs
Line loss detection (AM/BM)
Average (sin
2
+ cos
2
) > constant
Noise filtering (AM and BM)
Two-stage coarse count pulse reject filter with rejected pulse tally
Incremental position verification
Position compare between incremental accumulator and serial data performed
every 50 ms or less
56 pF
MTR_SIN+ or
MTR_COS+
MTR_SIN- or
MTR_COS-
+
1 k
Ω
+
to AqB Counter
1 k
Ω
1 k
Ω
1 k
Ω
121
Ω
56 pF
220 pF
2 k
Ω
220 pF
to A/D Converter
2 k
Ω
+2.5V
+2.5V
-
-
Kinetix 6200 or Kinetix 6500
Control Module
+
to UART
from UART
from UART
100 pF
MTR_DATA+
MTR_DATA-
1 k
Ω
to AqB Counter
1 k
Ω
1 k
Ω
100 pF
1 k
Ω
121
Ω
56 pF
56 pF
+5V
-
Shaded area indicates components that are part of the circuit, but support
other feedback device types (not used for Stegmann Hiperface support).
Kinetix 6200 or Kinetix 6500
Control Module