N6: online tuning, N5-07: speed feedback compensation selection, N5-08: speed feedback compensation gain (p) – Yaskawa L1000E AC Drive Technical Manual for CIMR-LE Models for Elevator Applications User Manual
Page 235: N6-01: online tuning selection, Common_tm, 9 n: special adjustments
5.9 n: Special Adjustments
YASKAWA ELECTRIC SIEP YAIL1E 01A YASKAWA AC Drive L1000E Technical Manual
235
P
a
ra
me
te
r De
ta
ils
5
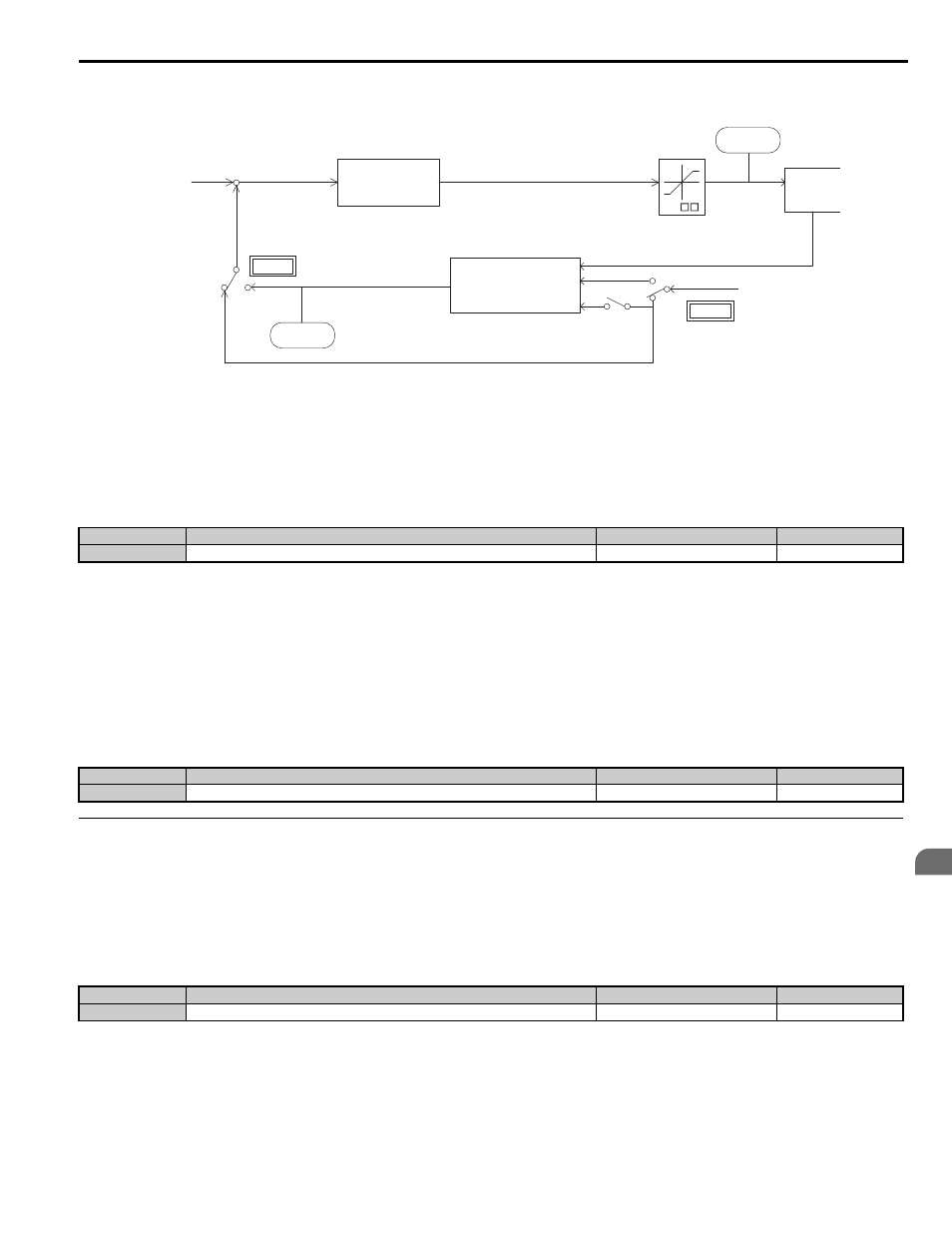
shows a block diagram for the Speed Feedback Compensation.
Figure 5.45
Figure 5.45 Speed Feedback Compensation Operation
■
n5-07: Speed Feedback Compensation Selection
Enables or disables the Speed Feedback Compensation.
Enabling the Speed Feedback Compensation can help stop motor oscillation that results from setting the ASR
proportional gain (C5-01) to a high value for faster speed response.
Setting 0: Disabled
Setting 1: Enabled
Setting 2: Speed Feedback Compensation test mode
■
n5-08: Speed Feedback Compensation Gain (P)
Sets the proportional gain for the Speed Feedback Compensation.
Although this parameter rarely requires adjustment, increasing the gain can help improve responsiveness relative to the
load. Lower setting if oscillation occurs.
◆ n6: Online Tuning
Online Tuning compensates insufficient torque and diminished speed control accuracy due to fluctuating motor
temperature.
■
n6-01: Online Tuning Selection
Selects the type of motor data Online Tuning uses for Open Loop Vector Control.
Setting 0: Disabled
Setting 1: Line-to-line resistance tuning
This setting enables line-to-line resistance online tuning. This procedure is effective for speed values up to 6 Hz and
improves the overload capacity in the low speed range by adjusting the value set for the motor resistance.
No.
Parameter Name
Setting Range
Default
n5-07
Speed Feedback Compensation Selection
0 to 2
0
No.
Parameter Name
Setting Range
Default
n5-08
Speed Feedback Compensation Gain (P)
0.00 to 300.00
3.00
No.
Parameter Name
Setting Range
Default
n6-01
Online Tuning Selection
0 to 2
2
+
–
Kn (1+1/ST)
Torque
Limit
C5-01, -02
ASR
L7-
Speed Observer
output monitor
Speed Feedback
Speed Observer Gain (P)
n5-07
n5-07
= 1
= 0, 2
= 1
= 0, 2
q-Axis
Current
Control
Torque
Reference
n5-08
q-Axis Current
Operating
Speed
= 2
U1-09
U6-56
common_TM