Digital operator display unit selection, 4 start-up flowcharts – Yaskawa L1000E AC Drive Technical Manual for CIMR-LE Models for Elevator Applications User Manual
Page 105
4.4 Start-Up Flowcharts
YASKAWA ELECTRIC SIEP YAIL1E 01A YASKAWA AC Drive L1000E Technical Manual
105
St
ar
t-
U
p
Pr
og
ra
m
m
in
g
&
Op
er
at
io
n
4
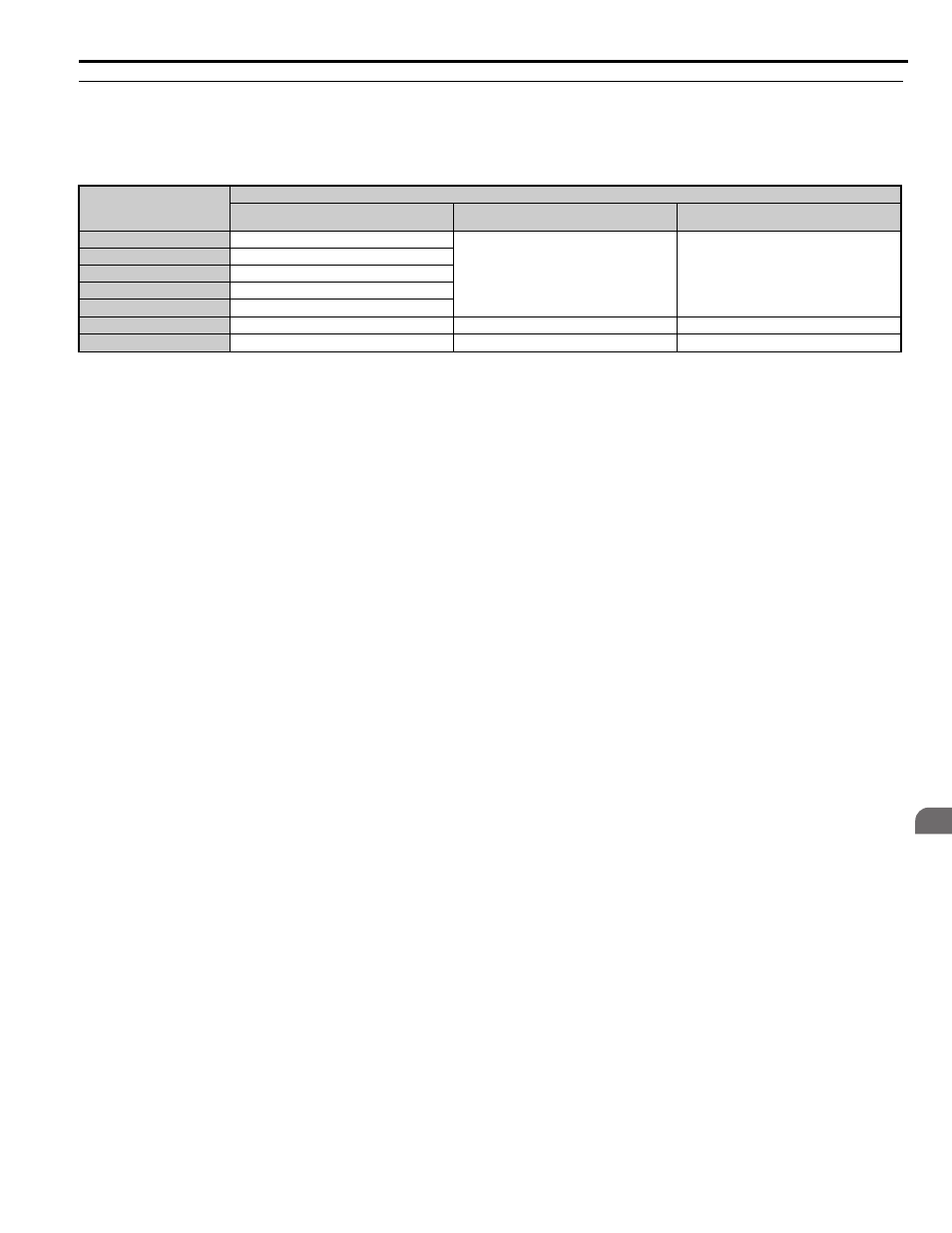
◆ Digital Operator Display Unit Selection
The drive can display different types of engineering units for speed related parameters and monitors, acceleration and
deceleration ramp, and jerk settings. Select the speed units using parameter o1-03 as shown below.
Certain mechanical data must be programmed to the drive prior to setting o1-03 to 4, 5, or 6. Perform the following steps
when using one of those settings:
1.
Make sure motor data are set up correctly. Verify the setting of the maximum output frequency in parameter E1-
04 and the setting for the number of motor poles in parameter E2-04 or E5-04.
2.
Set the traction sheave diameter in units of mm to parameter o1-20.
3.
Set the correct roping to parameter o1-21.
4.
If a mechanical gear is used, set the gear ratio (n
Motor
/n
Traction Sheave
) to parameter o1-22. If a gearbox is not used,
make sure o1-22 is set to 1.0.
5.
Change parameter o1-03 to setting 4 or 5. The unit and setting values of related parameters will be changed
automatically.
Refer to o1: Digital Operator Display Selection on page 395
for details.
o1-03 Setting
Display Unit
Speed Setting/Monitors
(d1-, U1-02, U1-02,...)
Accel/Decel Ramp
(C1-)
Jerk Settings
(C2-)
0
0.01 Hz
0.01 s
Set as the time in required to accelerate from zero
to the rated speed, and to decelerate from rated
speed to zero.
0.01 s
Set as the time used to change the accel/decel ramp
from zero to the accel/decel ramp setting of C1-
and vice versa.
1 (default)
0.01%
2
1 rpm
3
User defined
4
0.01 m/s
5
0.01 m/s
0.01 m/s
2
(Set as accel/decel ramp)
0.01 m/s
3
(set as jerk value)
6
0.1 ft/min
0.01 ft/s
2
(Set as accel/decel ramp)
0.01 ft/s
3
(set as jerk value)