Common_ tmonly, 7 h: terminal functions – Yaskawa L1000E AC Drive Technical Manual for CIMR-LE Models for Elevator Applications User Manual
Page 202
5.7 H: Terminal Functions
202
YASKAWA ELECTRIC SIEP YAIL1E 01A YASKAWA AC Drive L1000E Technical Manual
Setting B, 18: Torque detection 1, Torque detection 2
These digital output functions to signal an overtorque or undertorque situation to an external device.
Set up the torque detection levels and select the output function from the table below.
Refer to L6: Torque Detection on
for details.
Setting E: Fault
The output closes when the drive faults (excluding CPF00 and CPF01 faults).
Setting F: Not used (Through mode)
Select this setting when using the terminal in a pass-through mode. When set to F, an output does not trigger any function
in the drive. Setting F, however, still allows the output status to be read by a PLC via a communication option or
MEMOBUS/Modbus communications.
Setting 10: Minor fault
Output closes when a minor fault condition is present.
Setting 11: Fault reset command active
Output closes whenever there is an attempt to reset a fault situation from the control circuit terminals, via serial
communications, or using a communications option card.
Setting 12: Timer output
This setting configures a digital output terminal as output for the timer function.
Refer to b4: Delay Timers on page 159
for details.
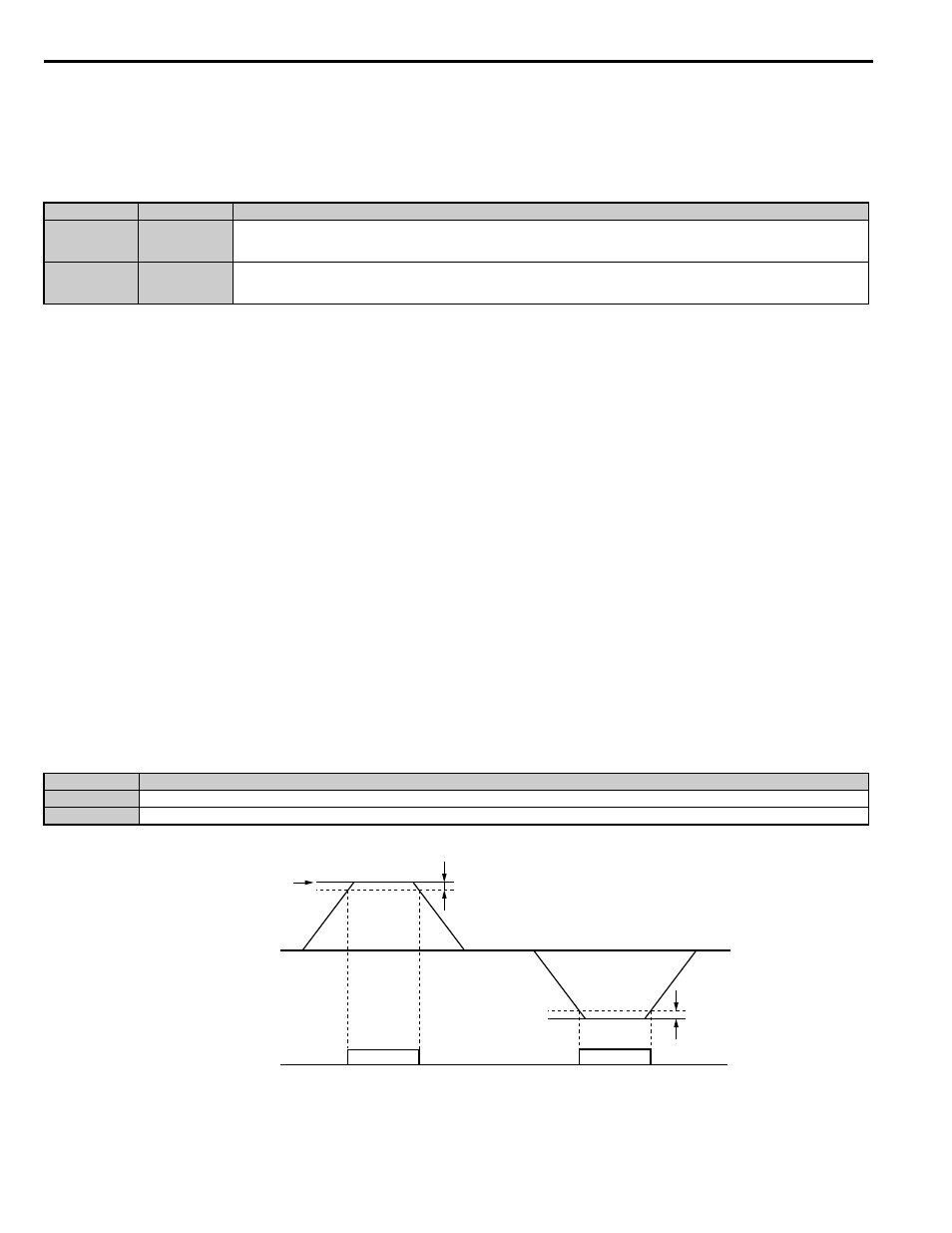
Setting 13: Speed agree 2 (f
ref
/f
out
agree 2)
Closes whenever the actual output speed or motor speed (CLV, CLV/PM) is within the speed agree width (L4-04) of the
current speed reference, regardless of the direction.
Note: Detection works in both forward and reverse.
Figure 5.23
Figure 5.23 Speed Agree 2 Time Chart
Refer to L4-03, L4-04: Speed Agreement Detection Level and Detection Width (+/-) on page 220
Setting
Status
Description
B
Closed
Torque detection 1:
Output current/torque exceeds (overtorque detection) or is below (undertorque detection) the torque value set in parameter L6-02 for longer than
the time specified in parameter L6-03.
18
Closed
Torque detection 2:
Output current/torque exceeds (overtorque detection) or is below (undertorque detection) the torque value set in parameter L6-05 for longer than
the time specified in parameter L6-06.
Status
Description
Open
Output speed or motor speed does not match the speed reference while the drive is running.
Closed
Output speed or motor speed is within the range of speed reference ±L4-04.
L4-04
L4-04
Speed
reference
Speed Agree 2
ON
OFF
Output speed
or motor speed
common_
TMonly