C3: slip compensation, C3-01: slip compensation gain, C3-02: slip compensation primary delay time – Yaskawa L1000E AC Drive Technical Manual for CIMR-LE Models for Elevator Applications User Manual
Page 165: C3-03: slip compensation limit, Common_tmo, 3 c: tuning
5.3 C: Tuning
YASKAWA ELECTRIC SIEP YAIL1E 01A YASKAWA AC Drive L1000E Technical Manual
165
P
a
ra
me
te
r De
ta
ils
5
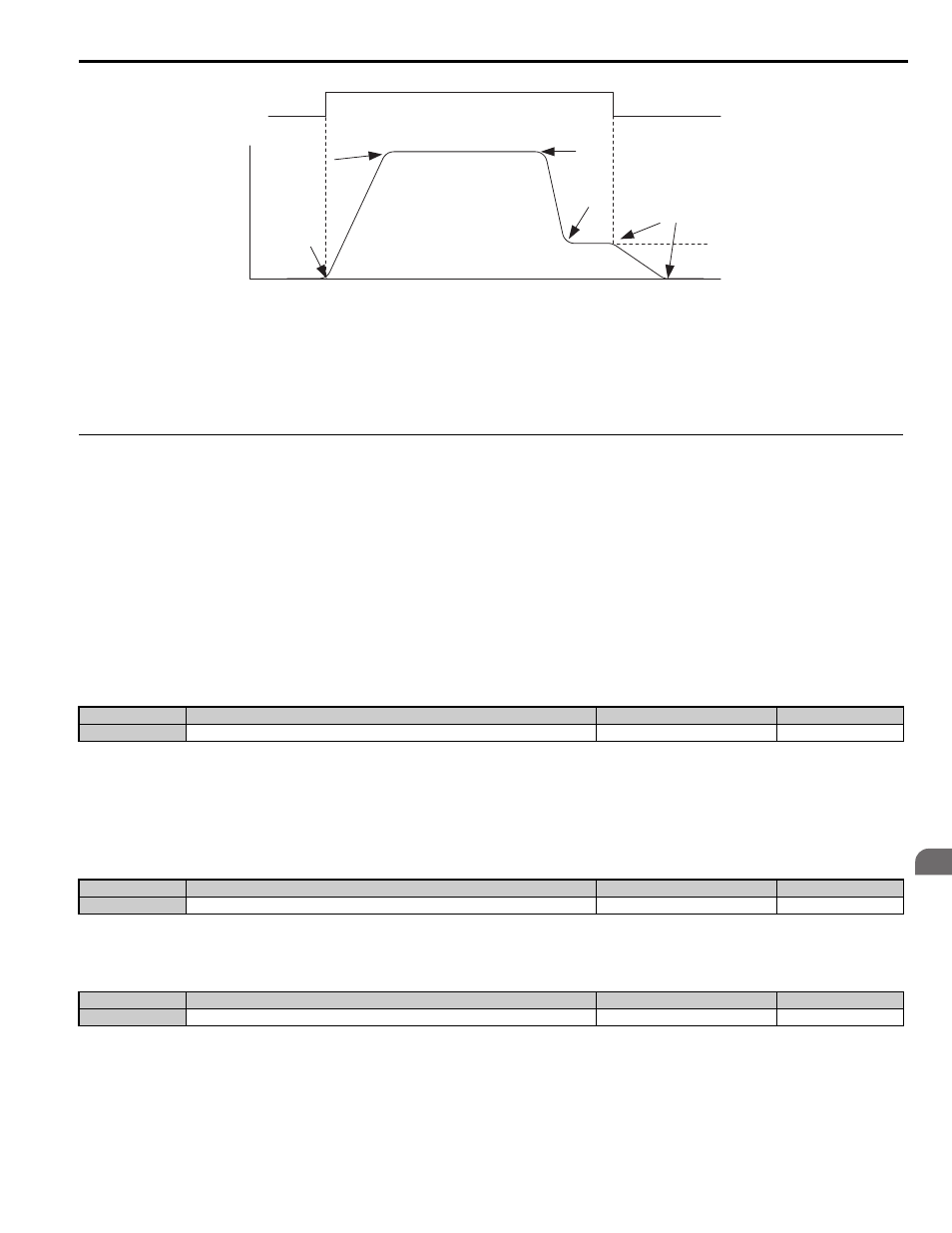
Figure 5.7
Figure 5.7 Jerk Settings
When o1-03 is set to between 0 and 4, the jerk settings are expressed in seconds. Then the actual accel/decel time
including jerk settings can be calculated as follows:
Actual accel ramp = accel ramp setting + (C2-01 + C2-02) / 2
Actual decel ramp = decel ramp setting + (C2-03 + C2-04) / 2
◆ C3: Slip Compensation
The Slip Compensation function improves the speed accuracy of an induction motor. By adjusting the output speed in
accordance with the motor load, it compensates the slip and makes the motor speed equal to the speed reference.
Note: Perform Auto-Tuning and make sure that the motor rated current (E2-01), the motor rated slip (E2-02), and the no-load current
(E2-03) have all been set properly before making any adjustments to slip compensation parameters.
■
C3-01: Slip Compensation Gain
Sets the gain for the motor slip compensation function. Although this parameter rarely needs to be changed, adjustments
may be necessary under the following circumstances:
• Increase the setting if the motor at constant speed is slower than the speed reference.
• Decrease the setting if the motor at constant speed is faster than the speed reference.
■
C3-02: Slip Compensation Primary Delay Time
Adjusts the filter on the output side of the slip compensation function. Although this parameter rarely needs to be
changed, adjustment may help in the following situations:
• Decrease the setting when the slip compensation response is too slow.
• Increase this setting when speed is unstable.
■
C3-03: Slip Compensation Limit
Sets the upper limit for the slip compensation function as a percentage of the motor rated slip (E2-02).
The slip compensation limit is constant throughout the constant torque range (speed reference
≤ E1-06). In the constant
power range (speed reference
≥ E1-06), it is increased based on C3-03 and the output speed as shown in
.
No.
Parameter Name
Setting Range
Default
C3-01
Slip Compensation Gain
0.0 to 2.5
1.0
No.
Parameter Name
Setting Range
Default
C3-02
Slip Compensation Primary Delay Time
0 to 10000 ms
2000 ms
No.
Parameter Name
Setting Range
Default
C3-03
Slip Compensation Limit
0 to 250%
200%
C2-05
C2-01
C2-02
C2-04
C2-03
Time
ON
Up/Down command
Output
speed
OFF
common_TMo