C4: torque compensation, C3-23: motor 2 slip compensation limit, C4-01: torque compensation gain – Yaskawa L1000E AC Drive Technical Manual for CIMR-LE Models for Elevator Applications User Manual
Page 167: Common_tmo, 3 c: tuning, Sets the gain for the torque compensation function
5.3 C: Tuning
YASKAWA ELECTRIC SIEP YAIL1E 01A YASKAWA AC Drive L1000E Technical Manual
167
P
a
ra
me
te
r De
ta
ils
5
■
C3-22: Motor 2 Slip Compensation Primary Delay Time
Functions for motor 2 in the same way that C3-02 functions for motor 1.
Refer to
C3-02: Slip Compensation Primary Delay Time on page 165
for instructions on how to adjust this parameter.
Note: The default for V/f Control (A1-02 = 0) is 2000 ms. The default for Open Loop Vector Control (A1-02 = 2) is 200 ms.
■
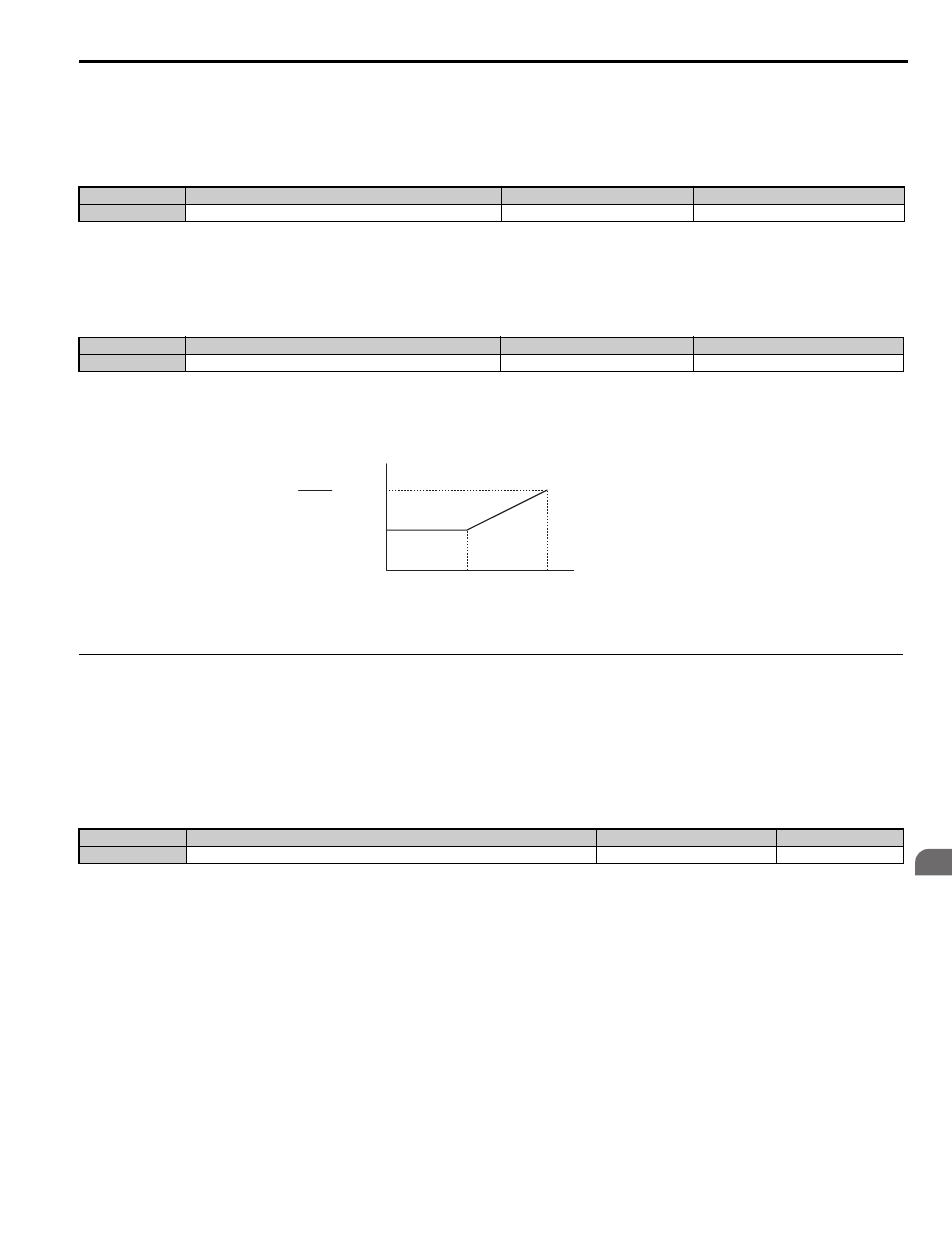
C3-23: Motor 2 Slip Compensation Limit
Sets the upper limit for the slip compensation function as a percentage of the motor rated slip (E4-02).
The slip compensation limit is constant throughout the constant torque range (frequency reference
≤ E3-06). In the
constant power range (frequency reference
≥ E3-06), it is increased based on C3-23 and the output frequency as shown in
the following diagram.
Figure 5.9
Figure 5.9 Slip Compensation Limit
◆ C4: Torque Compensation
The torque compensation function compensates for insufficient torque production at start-up or when a load is applied.
Note: Set the motor parameters and V/f pattern properly before setting torque compensation parameters.
■
C4-01: Torque Compensation Gain
Sets the gain for the torque compensation function.
Torque Compensation in V/f:
The drive calculates the motor primary voltage loss using the output current and the line to line resistance (E2-05) and
then adjusts the output voltage to compensate insufficient torque at start or when load is applied. The effects of this
voltage compensation can be increased or decreased using parameter C4-01.
Torque Compensation in OLV:
The drive controls the motor excitation current (d-Axis current) and torque producing current (q-Axis current) separately.
Torque compensation affects the torque producing current only. C4-01 works as a factor of the torque reference value that
builds the torque producing current reference.
No.
Parameter Name
Setting Range
Default
C3-22
Motor 2 Slip Compensation Primary Delay Time
0 to 10000 ms
Determined by A1-02
No.
Parameter Name
Setting Range
Default
C3-23
Motor 2 Slip Compensation Limit
0 to 250%
200%
No.
Parameter Name
Setting Range
Default
C4-01
Torque Compensation Gain
0.00 to 2.50
1.00
E3-04
E3-06 × C3-23
C3-23
E3-04
Maximum
Frequency
E3-06
Base
Frequency
Output Frequency
common_TMo