External input/output boards – Rockwell Automation 7000L PowerFlex 7000 Medium Voltage AC Drive C Frame - Marine User Manual
Page 285
Component Definition and Maintenance 4-109
7000 ―C‖ Frame - Marine
7000L-UM302B-EN-P – June 2013
The other role of the POL_QRDNT jumper is to correct the data
in the event the encoder was mounted so that a CCW rotation
produced decrementing counts. If this is the case the
POL_QRDNT jumper should be configured to the opposite of
what it should normally be for the data polarity. For example if
the Universal Encoder Interface is configured to operate with
High True encoders (POL_QRDNT installed), remove it to
correct for encoder mounting.
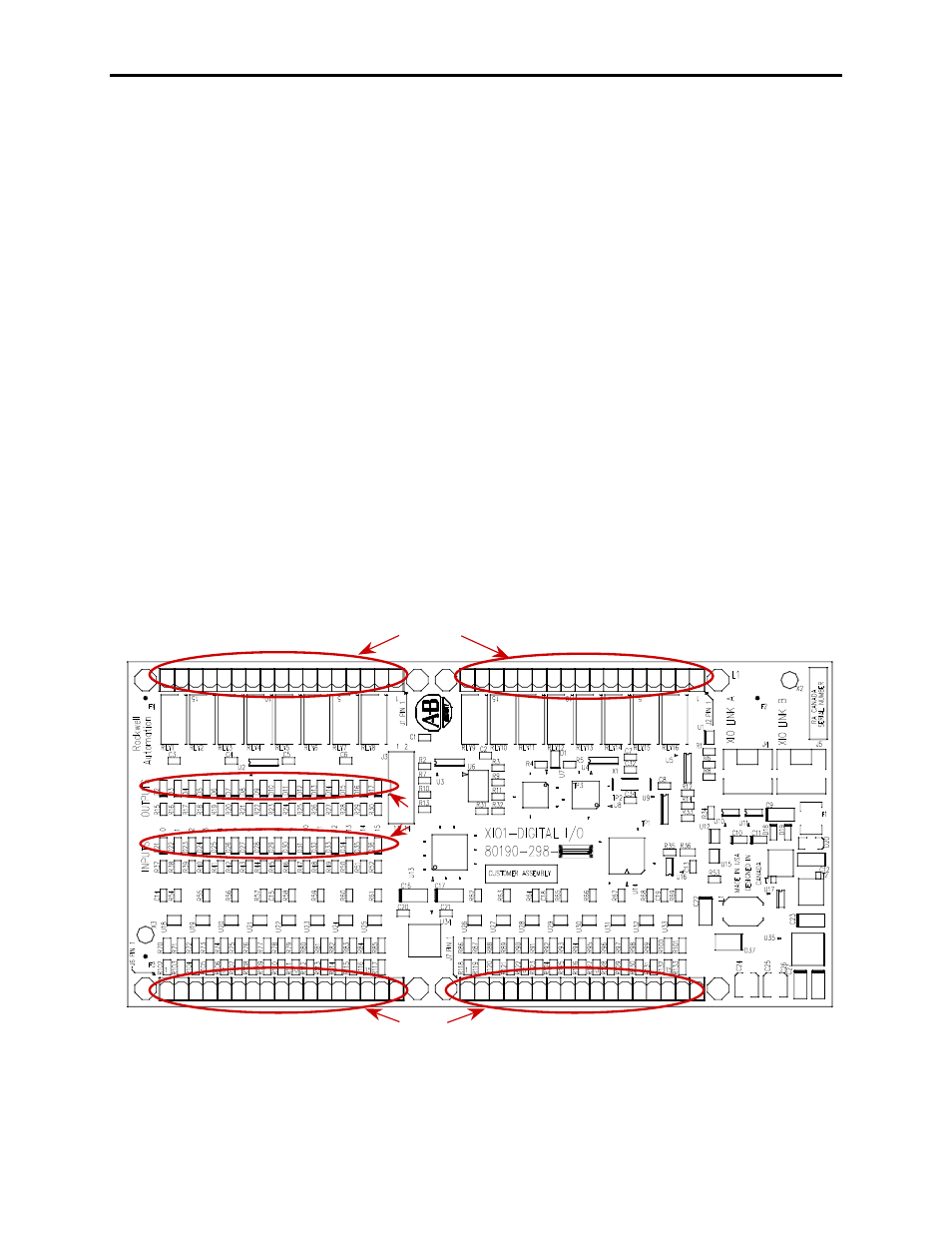
External Input/Output Boards
The External Input/Output (XIO) Boards are connected through a
network cable (CAN Link) to the Analog Control Board (ACB).
This cable may be connected to either XIO Link A (J4) or XIO Link B
(J5). The XIO board handles all external Digital Input and Output
signals and sends them to the ACB through the cable. There are 16
Isolated Inputs and 16 Isolated Outputs on the card, and they are
used for Runtime I/O including Start, Stop, Run, Fault, Warning,
Jog, and External Reset signals. The boards also handle the standard
drive fault signals (Transformer/Line Reactor Overtemperature, DC
Link Overtemperature, etc.) and several spare configurable fault
inputs. There is an option in software to assign each XIO a specific
function (General IO, External IO or Liquid Cooling).
16 15 14 13 12 11 10 9
8 7 6 5 4 3 2 1
1 2 3 4 5 6 7 8
9 10 11 12 13 14 15 16
OUTPUTS
INPUTS
LEDS
Figure 4.77 – XIO Board