Yaskawa Σ-V Series AC Servo Drives Rotational Motor MECHATROLINK-III User Manual
Page 331
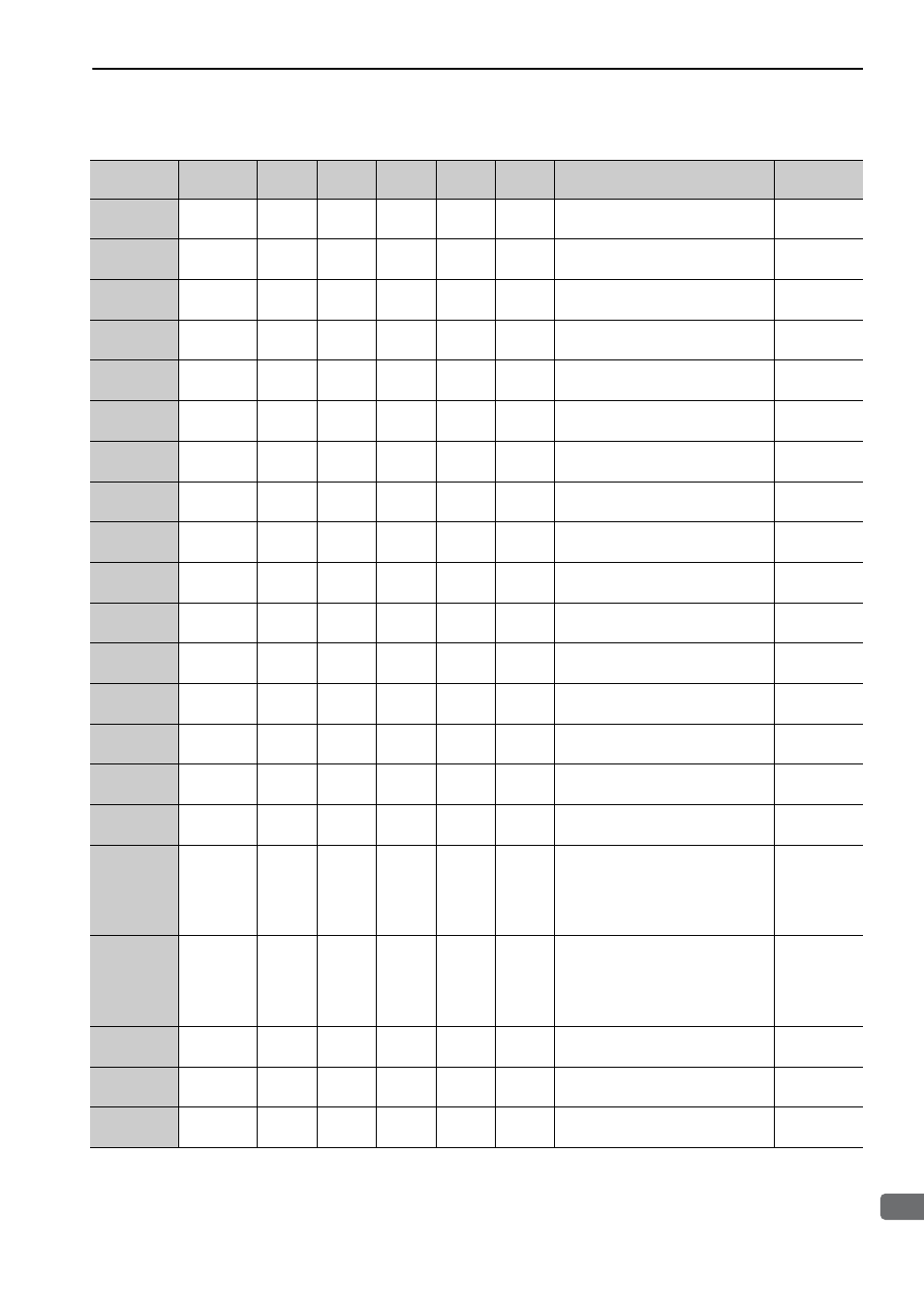
9.3 Parameter Recording Table
9-49
9
Ap
pend
ix
44
PnA88
0
Position Base Unit
After restart
45
PnA8A
0
Acceleration Unit
After restart
46
PnA8C
4
Acceleration Base Unit
After restart
47
PnA8E
1
Torque Unit
After restart
48
PnA90
0
Torque Base Unit
After restart
49
PnA92
0601011FH
Compliance Unit System (read only)
–
61
PnAC2
40000
Speed Loop Gain
Immediately
62
PnAC4
20000
Speed Loop Integral Time Constant
Immediately
63
PnAC6
40000
Position Loop Gain
Immediately
64
PnAC8
0
Feedforward Compensation
Immediately
65
PnACA
0
Position Loop Integral Time Constant Immediately
66
PnACC
7
Positioning Completed Width
Immediately
67
PnACE
1073741824
NEAR Signal Width
Immediately
81
PnB02
0
Exponential Function Accel/Decel
Time Constant
Immediately
∗
2
82
PnB04
0
Movement Average Time
Immediately
∗
2
83
PnB06
100
Final Travel Distance for External
Positioning
Immediately
84
PnB08
5000
Value con-
verted refer-
ence/s into
10
-3
min
-1
Homing Approach Speed
Immediately
85
PnB0A
500
Value con-
verted refer-
ence/s into
10
-3
min
-1
Homing Creep Speed
Immediately
86
PnB0C
100
Final Travel Distance for Homing
Immediately
87
PnB0E
1
Monitor Selection 1
Immediately
88
PnB10
0
Monitor Selection 2
Immediately
∗2.
Change the setting when the reference is stopped (DEN is set to 1), because the change will affect the output during
operation.
Note: When using parameters that are enabled after restarting the SERVOPACK, a CONFIG command must be input or
the power must be turned OFF and then ON again.
(cont’d)
Parameter
Factory
Setting
Name
When
Enabled