Yaskawa Σ-V Series AC Servo Drives Rotational Motor MECHATROLINK-III User Manual
Page 317
9.1 List of Parameters
9-35
9
Ap
pend
ix
49
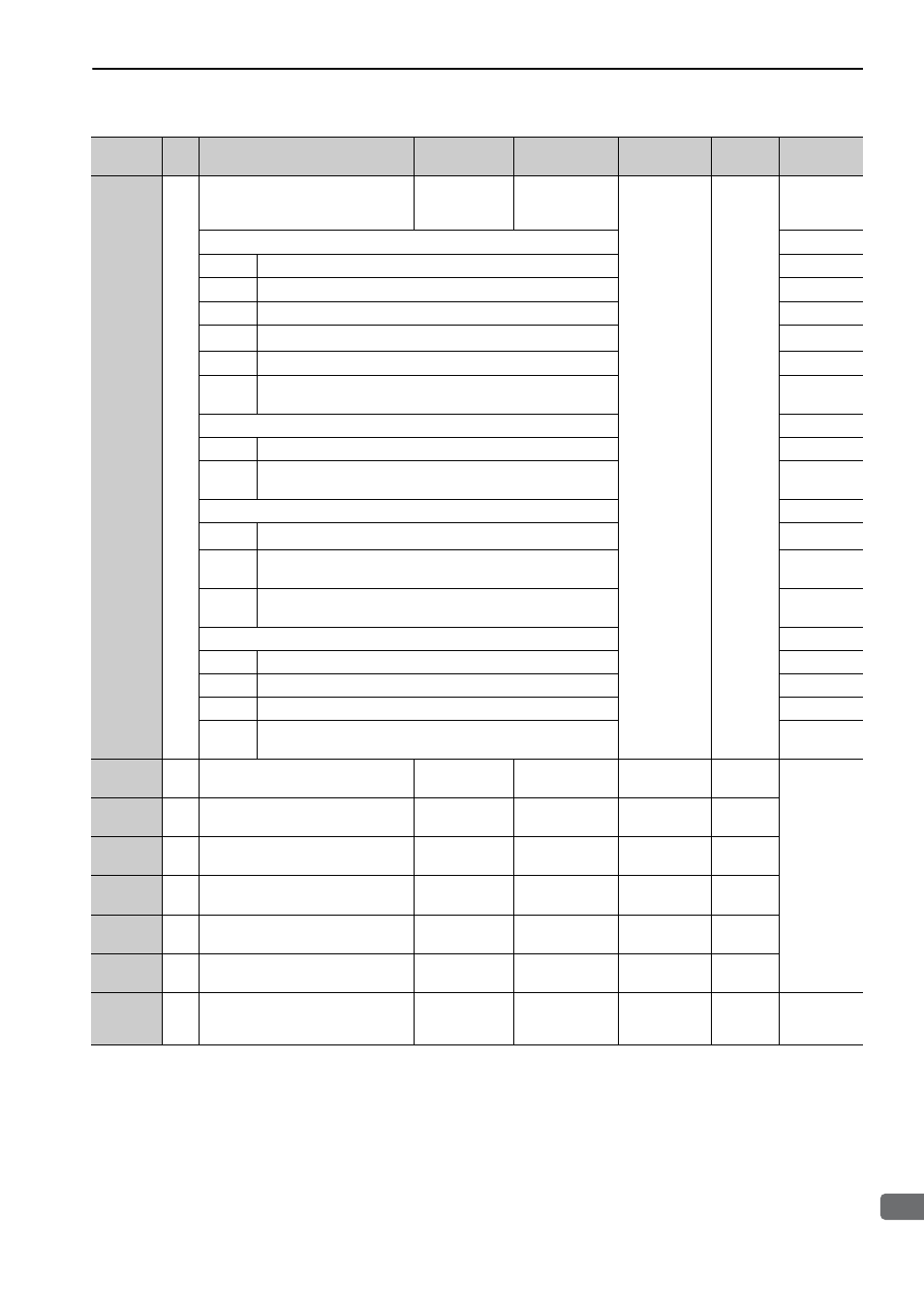
PnA92
4
Compliance Unit System (read only)
–
–
0601011FH
–
Unit System
Related
Parameters
Speed
Bit 0
reference unit/s (1: Enabled)
Bit 1
reference unit/min (1: Enabled)
Bit 2
Percentage (%) of rated speed (1: Enabled)
Bit 3
min
-1
(rpm) (1: Enabled)
Bit 4
Max. motor speed/4000000H [HEX] (1: Enabled)
Bit
5 to 7
Reserved (0: Disabled)
Position
Bit 8
reference unit (1: Enabled)
Bit
9 to 15
Reserved (0: Disabled)
Acceleration
Bit 16
reference unit/s
2
(1: Enabled)
Bit 17
msec (Acceleration time taken to reach the rated speed)
(0: Disabled)
Bit
18 to 23
Reserved (0: Disabled)
Torque
Bit 24
N m (N) (0: Disabled)
Bit 25
Percentage (%) of rated torque (1: Enabled)
Bit 26
Max. torque/40000000 [HEX] (1: Enabled)
Bit
27 to 31 Reserved (0: Disabled)
61
PnAC2
4
Speed Loop Gain
1000 to
2000000
0.001 Hz
[0.1 Hz]
40000
Immedi-
ately
Adjustment
Related
Parameters
62
PnAC4
4
Speed Loop Integral Time Constant
150 to 512000
μ
s
[0.01 ms]
20000
Immedi-
ately
63
PnAC6
4
Position Loop Gain
1000 to
2000000
0.001/s
[0.1/s]
40000
Immedi-
ately
64
PnAC8
4
Feedforward Compensation
0 to 100
1%
0
Immedi-
ately
65
PnACA
4
Position Loop Integral Time Con-
stant
0 to 5000000
μ
s
[0.1 ms]
0
Immedi-
ately
66
PnACC
4
Positioning Completed Width
0 to
1073741824
1 reference unit
7
Immedi-
ately
67
PnACE
4
NEAR Signal Width
1 to
1073741824
1 reference unit
1073741824
Immedi-
ately
Adjustment
Related
Parameters
Parameter
No.
Size
Name
Setting Range
Units
[Resolution]
Factory
Setting
When
Enabled
Classifica-
tion