82 (6) mechatrolink monitor information – Yaskawa Σ-V Series AC Servo Drives Rotational Motor MECHATROLINK-III User Manual
Page 192
5 Adjustments
5.8.6 Backlash Compensation Function
5-82
(6) MECHATROLINK Monitor Information
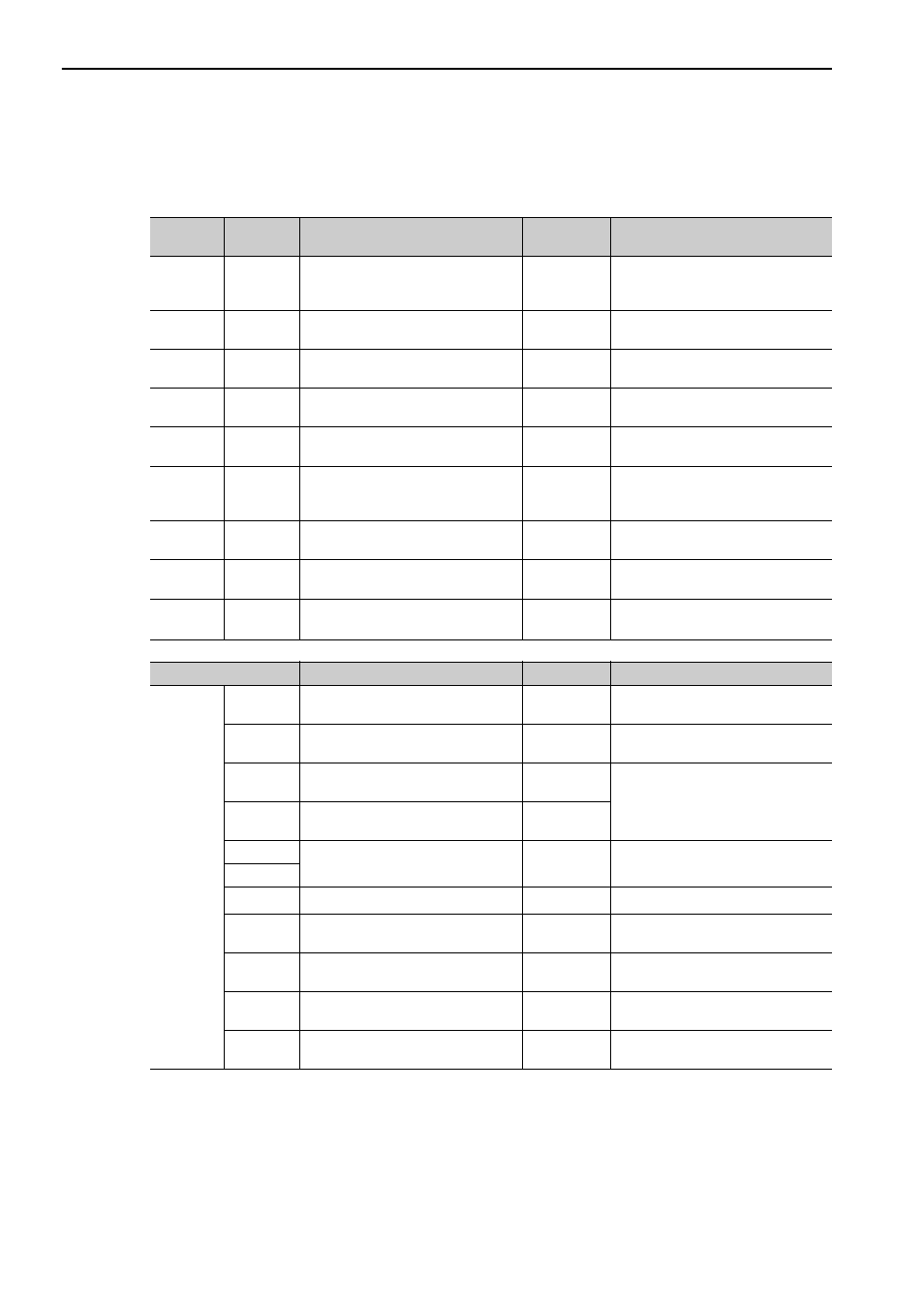
This section describes the information that is set for the MECHATROLINK monitoring information (Monitor
1, Monitor 2, Monitor 3, and Monitor 4) and the backlash compensation operation.
Monitor
Code
Designation
Meaning
Unit
Remarks
0
POS
Reference position in the reference
coordinate system (after the position
reference filter)
Reference
unit
–
1
MPOS
Reference position
Reference
unit
–
2
PERR
Position error
Reference
unit
–
3
APOS
Feedback position in the machine
coordinate system
Reference
unit
Feedback position with the backlash
compensation subtracted
4
LPOS
Feedback latch position in the
machine coordinate system
Reference
unit
Feedback position with the backlash
compensation subtracted
5
IPOS
Reference position in the reference
coordinate system (before the position
reference filter)
Reference
unit
–
6
TPOS
Target position in the reference coor-
dinate system
Reference
unit
–
E
OMN1
Option monitor 1
(selected with Pn824)
–
–
F
OMN2
Option monitor 2
(selected with Pn825)
–
–
Parameters
Monitor Information
Output Unit
Remarks
Pn824
Pn825
0003H
Position error (lower 32 bits)
Reference
unit
–
0004H
Position error (upper 32 bits)
Reference
unit
–
000AH
Encoder count (lower 32 bits)
Reference
unit
Count value of the actually driven
motor encoder
000BH
Encoder count (upper 32 bits)
Reference
unit
000CH
Reserved
–
–
000DH
0017H
Un007: Input reference speed
min
-1
Same as monitor mode Un007
0018H
Un008: Position error amount
Reference
unit
Same as monitor mode Un008
001CH
Un00C: Input reference counter
Reference
unit
Same as monitor mode Un00C
001DH
Un00D: Feedback pulse counter
Encoder
pulse
Same as monitor mode Un00D
0080H
Previous value of latched feedback
position (LPOS)
Encoder
pulse
Feedback position with the backlash
compensation subtracted