6 multiturn limit disagreement alarm (a.cc0), 1) preparation, 2) operating procedure – Yaskawa Σ-V Series AC Servo Drives Rotational Motor MECHATROLINK-III User Manual
Page 101: Mec ha
4 Operation
4.7.6 Multiturn Limit Disagreement Alarm (A.CC0)
4-36
Set the value, the desired rotational amount -1, to Pn205.
4.7.6
Multiturn Limit Disagreement Alarm (A.CC0)
When the multiturn limit set value is changed with parameter Pn205, a multiturn limit disagreement alarm
(A.CC0) will be displayed because the value differs from that of the encoder.
If this alarm is displayed, perform the procedure given in
(2) Operating Procedure
to change the multiturn
limit value in the encoder to the value set in Pn205.
(1) Preparation
The following condition must be met to clear the alarm and change the multiturn limit value.
• The write prohibited setting parameter (Fn010) must be set to Write permitted (P.0000).
(2) Operating Procedure
Use the following procedure.
This setting can be performed with the write memory command (MEM_WR).
For information the write memory command (MEM_WR), refer to
Σ
-V Series User’s Manual MECHA-
TROLINK-III Standard Servo Profile Commands
(Manual No.: SIEP S800000 63).
1.
In the SigmaWin+ main window, click
Setup
–
Set Absolute Encoder
–
Multi-Turn Limit
Setting
.
A verification message will appear confirming if you want to continue although the position data will
change.
Click
Cancel
to return to the main window without setting the multi-turn limit.
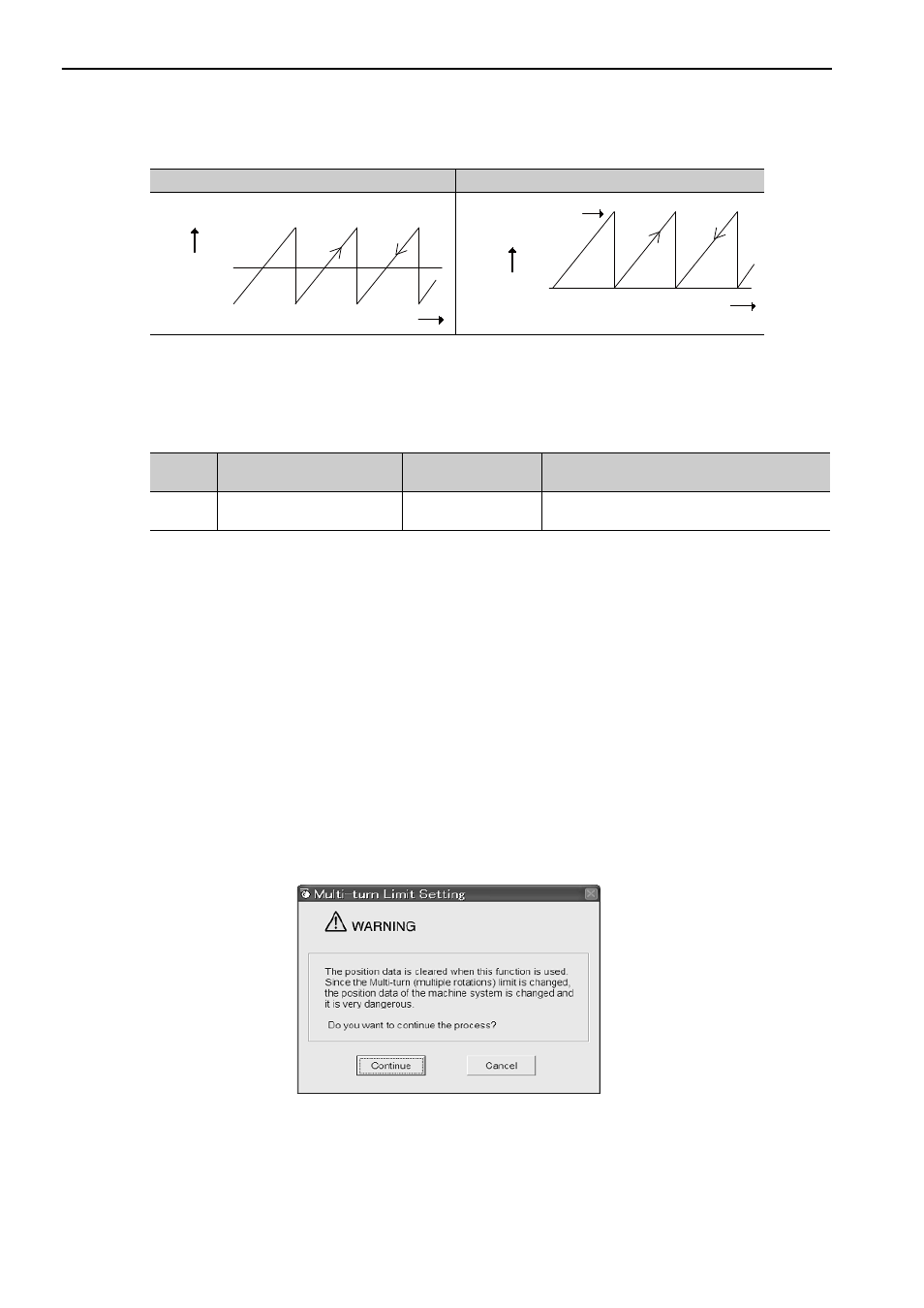
Factory Setting (= 65535)
Other Setting (
≠
65535)
+32767
-32768
Motor rotations
0
Rotational
data
Reverse
Forward
0
Motor rotations
Pn205 setting value
Reverse
Forward
Rotational
data
Alarm
Display
Alarm Name
Alarm Output
Meaning
A.CC0
Multiturn Limit Disagreement
OFF (H)
Different multiturn limits have been set in the
encoder and SERVOPACK.
MEC
HA