30 (2) failure in operation – Yaskawa Σ-V Series AC Servo Drives Rotational Motor MECHATROLINK-III User Manual
Page 140
5 Adjustments
5.3.2 Advanced Autotuning Procedure
5-30
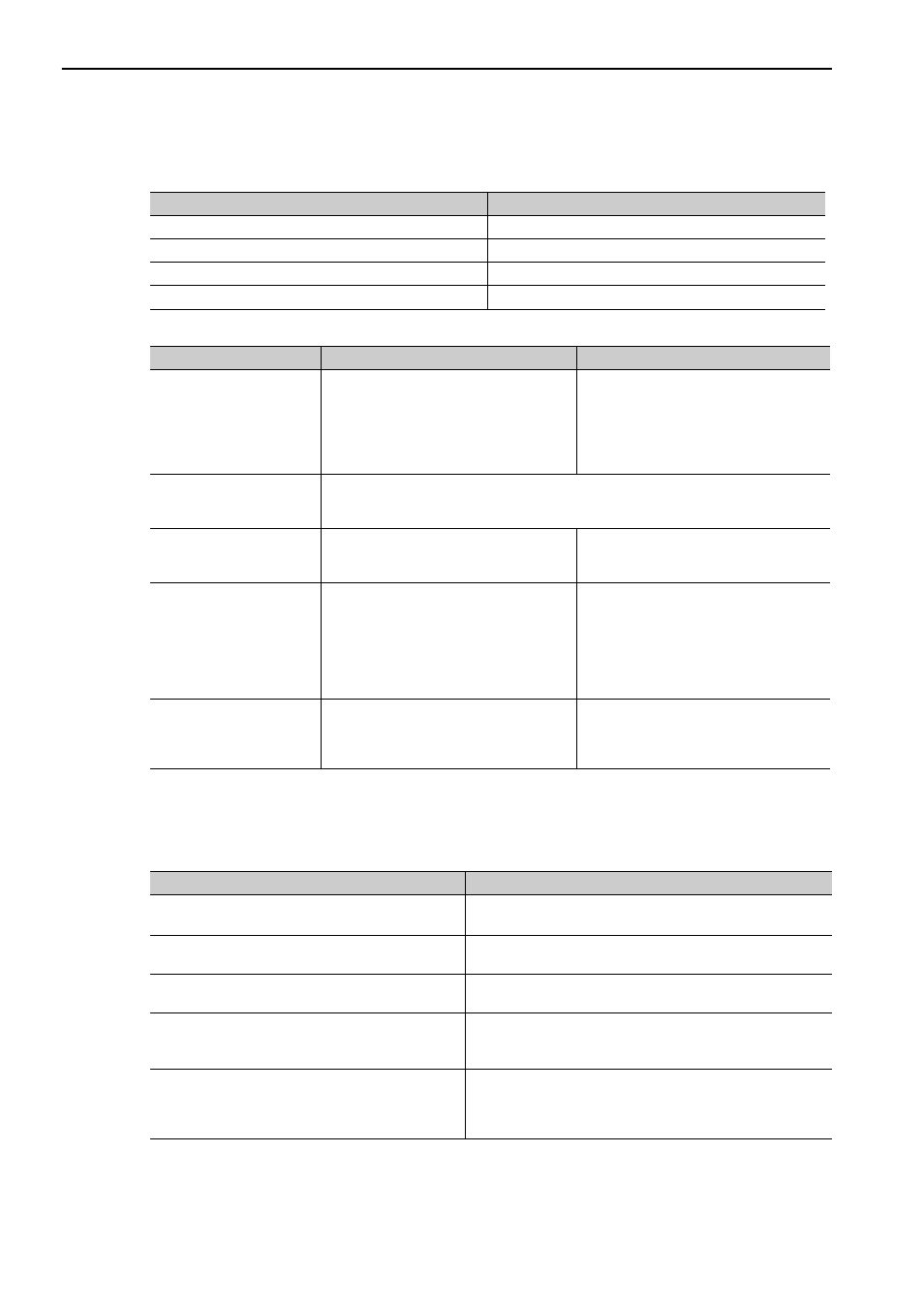
(2) Failure in Operation
When Operation Cannot be Performed
When an Error Occurs
When an Error Occurs during Calculation of Moment of Inertia
The following table shows the probable causes of errors that may occur during the calculation of the moment
of inertia with the Jcalc set to ON, along with corrective actions for the errors.
Probable Cause
Corrective Actions
The main circuit power supply was OFF.
Turn ON the main circuit power supply.
An alarm or warning occurred.
Remove the cause of the alarm or the warning.
Overtraveling occurred.
Remove the cause of the overtravel.
Gain setting 2 was selected by gain switching.
Disable the automatic gain switching.
Error
Probable Cause
Corrective Actions
The gain adjustment was
not successfully
completed.
Machine vibration is occurring or the posi-
tioning completed signal (/COIN) is turning
ON and OFF when the servomotor is
stopped.
• Increase the set value for Pn522.
• Change the mode from 2 to 3.
• If machine vibration occurs, suppress the
vibration with the anti-resonance control
adjustment function and the vibration
suppression function.
An error occurred during
the calculation of the
moment of inertia.
Refer to the following table
When an Error Occurs during Calculation of Moment of
Inertia
.
Travel distance setting
error
The travel distance is set to approximately
0.5 rotation or less, which is less than the
minimum adjustable travel distance.
Increase the travel distance. It is recom-
mended to set the number of motor rota-
tions to around 3.
The positioning
completed signal (/COIN)
did not turn ON within
approximately 10 seconds
after positioning
adjustment was
completed.
The positioning completed width is too nar-
row or proportional control (P control) is
being used.
• Increase the set value for Pn522.
• Set 0 to V_PPI in the servo command
output signals (SVCMD_IO).
The moment of inertia
cannot be calculated
when the tuning-less
function was activated.
When the tuning-less function was
activated, Jcalc was set to OFF so the
moment of inertia was not calculated.
• Turn OFF the tuning-less function.
• Set Jcalc to ON
,
so the moment of inertia
will be calculated.
Probable Cause
Corrective Actions
The SERVOPACK started calculating the moment of
inertia, but the calculation was not completed.
• Increase the speed loop gain (Pn100).
• Increase the STROKE (travel distance).
The moment of inertia fluctuated greatly and did not
converge within 10 tries.
Set the calculation value based on the machine specifications in
Pn103 and execute the calculation with the Jcalc set to OFF.
Low-frequency vibration was detected.
Double the set value of the moment of inertia calculating start
level (Pn324).
The torque limit was reached.
• When using the torque limit, increase the torque limit.
• Double the set value of the moment of inertia calculating start
level (Pn324).
While calculating the moment of inertia, the speed
control was set to proportional control by setting 1 to
V_PPI in the servo command output signals
(SVCMD_IO).
Operate the SERVOPACK with PI control while calculating the
moment of inertia.