Yaskawa Σ-V Series AC Servo Drives Rotational Motor MECHATROLINK-III User Manual
Page 209
6 Utility Functions (Fn
)
6-10
Note: When Pn536 (Number of Times of Program JOG Movement) is set to 0, infinite time operation is enabled. To stop
infinite time operation, press the
cancel
or
Servo OFF
of program JOG operation dialog box to turn OFF the servo-
motor power.
Note: When Pn530.0 is set to 2, infinite time operation is disabled.
Note: When Pn530.0 is set to 3, infinite time operation is disabled.
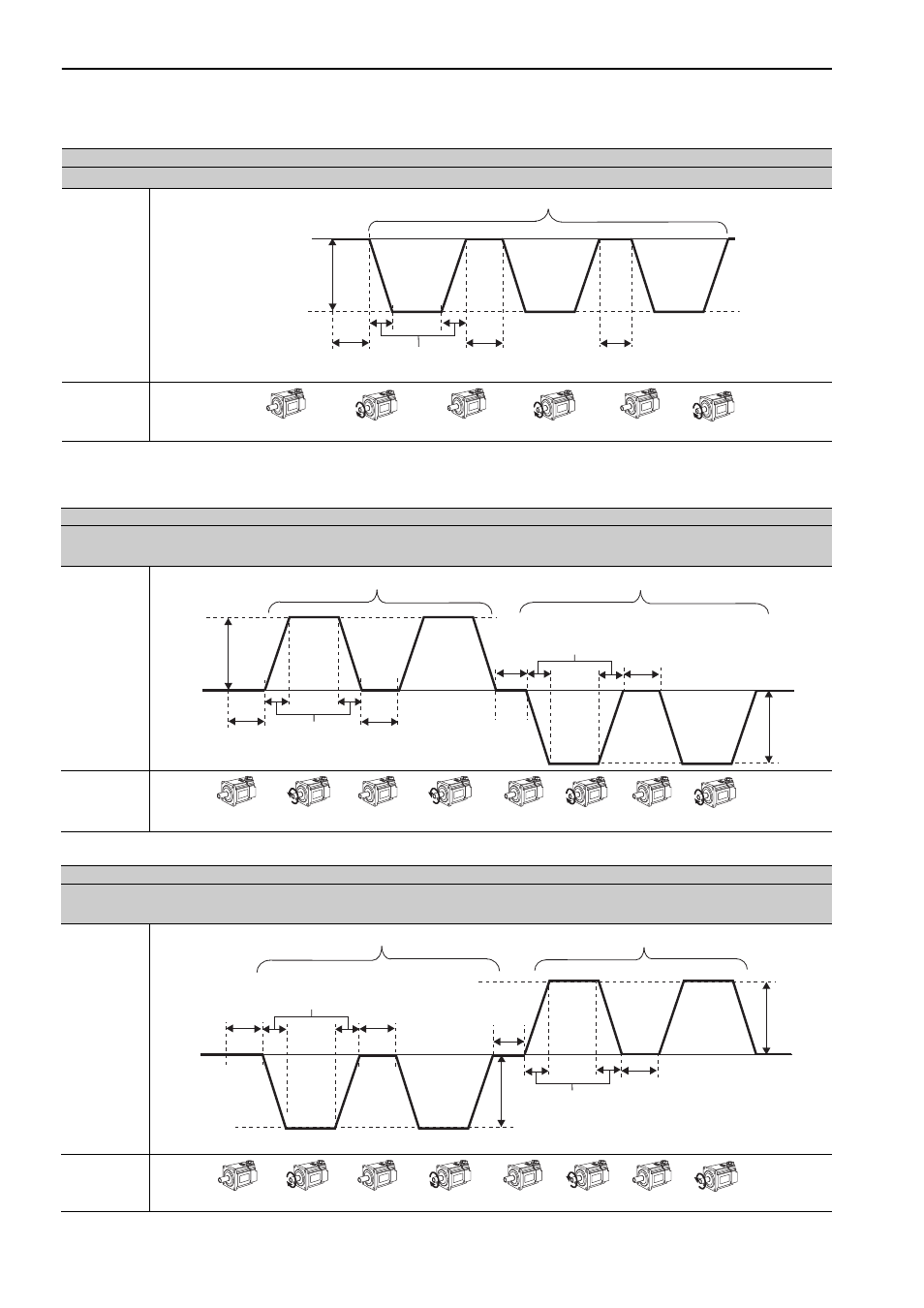
Pn530.0 = 1
(Waiting time Pn535
→
Reverse movement Pn531)
×
Number of movements Pn536
Speed
Diagram
Servomotor
Run Status
(Stop)
(Reverse)
(Stop)
(Reverse)
(Stop)
(Reverse)
Movement
speed
Pn533
Waiting time
Pn535
Accel/Decel time
Waiting time
Pn534
Pn535
Waiting time
Pn535
Number of movements Pn536
At zero speed
Movement
distance
Pn531
Movement
distance
Pn531
Movement
distance
Pn531
Pn530.0 = 2
(Waiting time Pn535
→
Forward movement Pn531)
×
Number of movements Pn536
(Waiting time Pn535
→
Reverse movement Pn531)
×
Number of movements Pn536
Speed
Diagram
Servomotor
Run Status
(Stop)
(Forward)
(Stop)
(Forward)
(Stop)
(Reverse)
(Stop) (Reverse)
Movement
speed
Movement
distance
Pn533
Pn531
Waiting time
Pn535
Accel/Decel
time
Accel/Decel time
Waiting time
Pn534
Pn535
Waiting time
Waiting time
Pn535
Movement
speed
Pn533
Pn534
Pn535
Number of movements Pn536
Number of movements Pn536
At zero
speed
Movement
distance
Pn531
Movement
distance
Pn531
Movement
distance
Pn531
Pn530.0 = 3
(Waiting time Pn535
→
Reverse movement Pn531)
×
Number of movements Pn536
(Waiting time Pn535
→
Forward movement Pn531)
×
Number of movements Pn536
Speed
Diagram
Servomotor
Run Status
(Stop)
(Reverse)
(Stop)
(Reverse)
(Stop)
(Forward)
(Stop) (Forward)
Movement speed
Pn533
Accel/Decel time
Accel/Decel time
Pn534
Waiting time
Waiting time
Pn535
Movement
speed
Pn533
Pn534
Pn535
Waiting time
Pn535
Waiting time
Pn535
Number of movements Pn536
Number of movements Pn536
At zero
speed
Movement
distance
Pn531
Movement
distance
Pn531
Movement
distance
Pn531
Movement
distance
Pn531