ElmoMC Multi-Axis Motion Controller-Maestro User Manual
Page 97
• @emcy(int nodeID, int first4bytes, int second4bytes)
o
NodeID – CAN node identifier [1,127].
o
First4bytes – first 4 bytes CAN message data.
o
Second4bytes – last 4 bytes CAN message data.
• @emcy(int nodeID, int first4bytes)
o
NodeID – CAN node identifier [1,127].
o
First4bytes – first 4 bytes CAN message data.
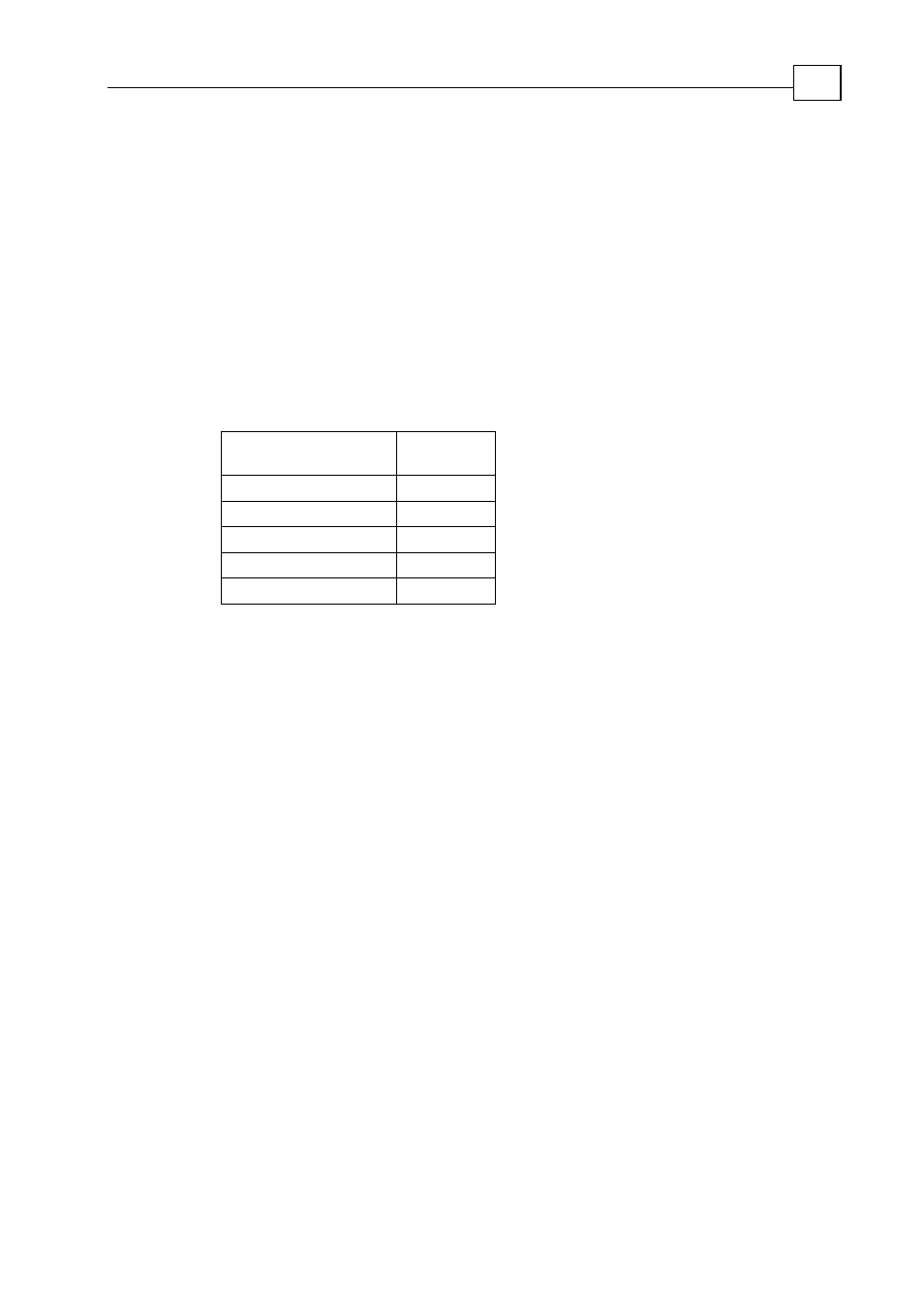
• @hbevent(int busID, int nodeID, int nodeState) – called when the CAN
node state is changed. For example, when a node has stopped producing
heartbeat messages, this function is called and returns a state value of –1.
The Maestro supports the following CAN node states:
Name
Valu
e
Boot Up
0
Pre operation
127
Operation 5
Stopped 4
No Heartbeat
-1
• @motioncompleted(int busId, int objId) - called when the target
reached event appears for the motion object (axis, vector, group). The
event must be previously initialized for selected motion object (See
also: amc, vmc, gmc property)
o
BusID – CAN bus identifier [0,1].
o
ObjID – CAN node or group identifier [1,127].
• @emit(int busId, int nodeId, int data) - called when the Simple IQ
program emit event (by command emit(channel_num)). The event
must be previously initialized for selected Elmo axis (See also: ape
property)
o
BusID – CAN bus identifier [0,1].
o
NodeID – CAN node identifier [1,127].
o
Data – event data (channel number), channel number can be
1, 3 or 4.
• @input(int busId, int nodeId, int data) - called when the input event
appears for Maestro or Simple IQ drive. The event must be previously
initialized for selected Elmo axis (See also: adi property). Maestro input
always is initialized.
o
BusID – CAN bus identifier [0,1].
o
NodeID – CAN node identifier [0 - 127]. If NodeID = 0 –
this is the Maestro input event, NodeID = 1 – 127 – drive
digital input event.
o
Data – input data.
Maestro
Software Manual
MAXL Program Language
MAN-MASSW (Ver. Q)
5-35