1 interpolated position (ip) commands – ElmoMC Multi-Axis Motion Controller-Maestro User Manual
Page 171
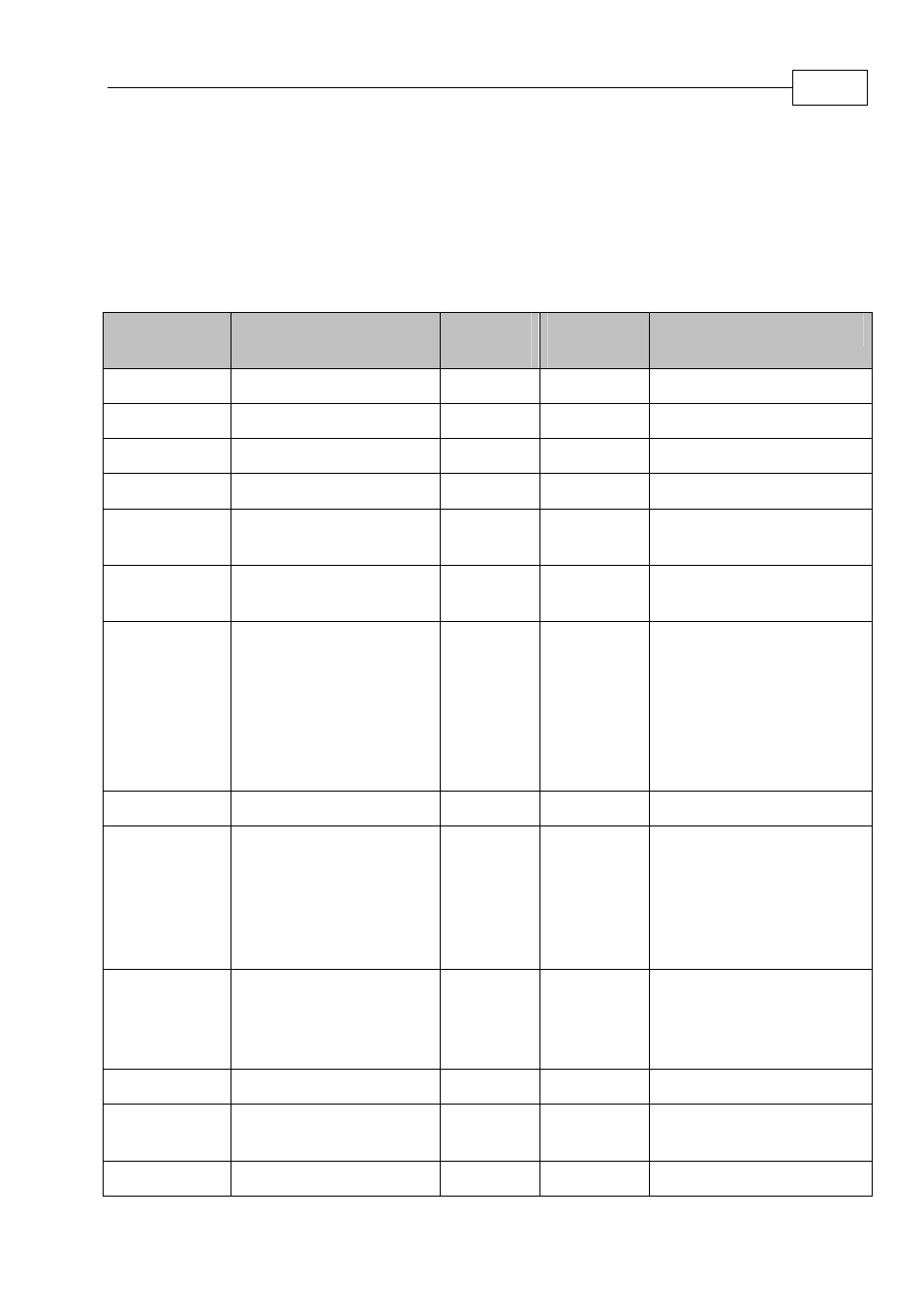
10.4.1 Interpolated Position (IP) Commands
Note: Set and get commands are allowed for Axis objects and only set commands are
allowed for the Vector and Group objects.
The following commands are implemented in IP mode:
Object Index
and Subindex
Full Command
Short
Command
Elmo Short
Command
Description
0x6081, 0x00
ProfileVelocity prv sp
Profile
velocity
0x6083, 0x00
ProfileAcceleration
pac ac
Profile
acceleration
0x6084, 0x00
ProfileDeceleration
pdc dc
Profile
deceleration
0x6085, 0x00
QuickStopDeceleration qsdc sd
Quick
stop
deceleration
0x6064, 0x00
ProfileActualPosition
pap
px
Profile actual position
(for axis only)
0x606C, 0x00
ProfileActualVelocity
pav
vx
Profile actual velocity
(for axis only)
0x6040, 0x00
0x6041, 0x00
0x60C1, 0x01
(for more view
PDO Mapping
table)
InterpolationActive
ipa -
Interpolation
mode
activate
command
0x60C0, 0x00
InterpolationSubMode ipsm
-
Interpolation sub mode
0x60C2, 0x00
InterpolationTimePeriod iptp
-
Interpolation time period
(Must be equal to the sync
period. The default value of
the syn period is the value
set by the last sync
command.)
0x60C1, 0x00
(for more view
PDO Mapping
table)
InterpolationDataRecord
ipdr
Interpolation
data
record
(See Section 11.8 DS402
PDO Mapping Table)
0x60C4, 0x02
InterpolationBufferSize ipbs -
Interpolation buffer size
0x60C4, 0x03
InterpolationBufferOrganiz
ation
ipbo -
Interpolation
buffer
organization
0x60C4, 0x04
InterpolationBufferPosition ipbp -
Interpolation
buffer
Maestro
Software Manual
DS402 Command Reference
MAN-MASSW (Ver. Q)
10-26