ElmoMC Multi-Axis Motion Controller-Maestro User Manual
Page 32
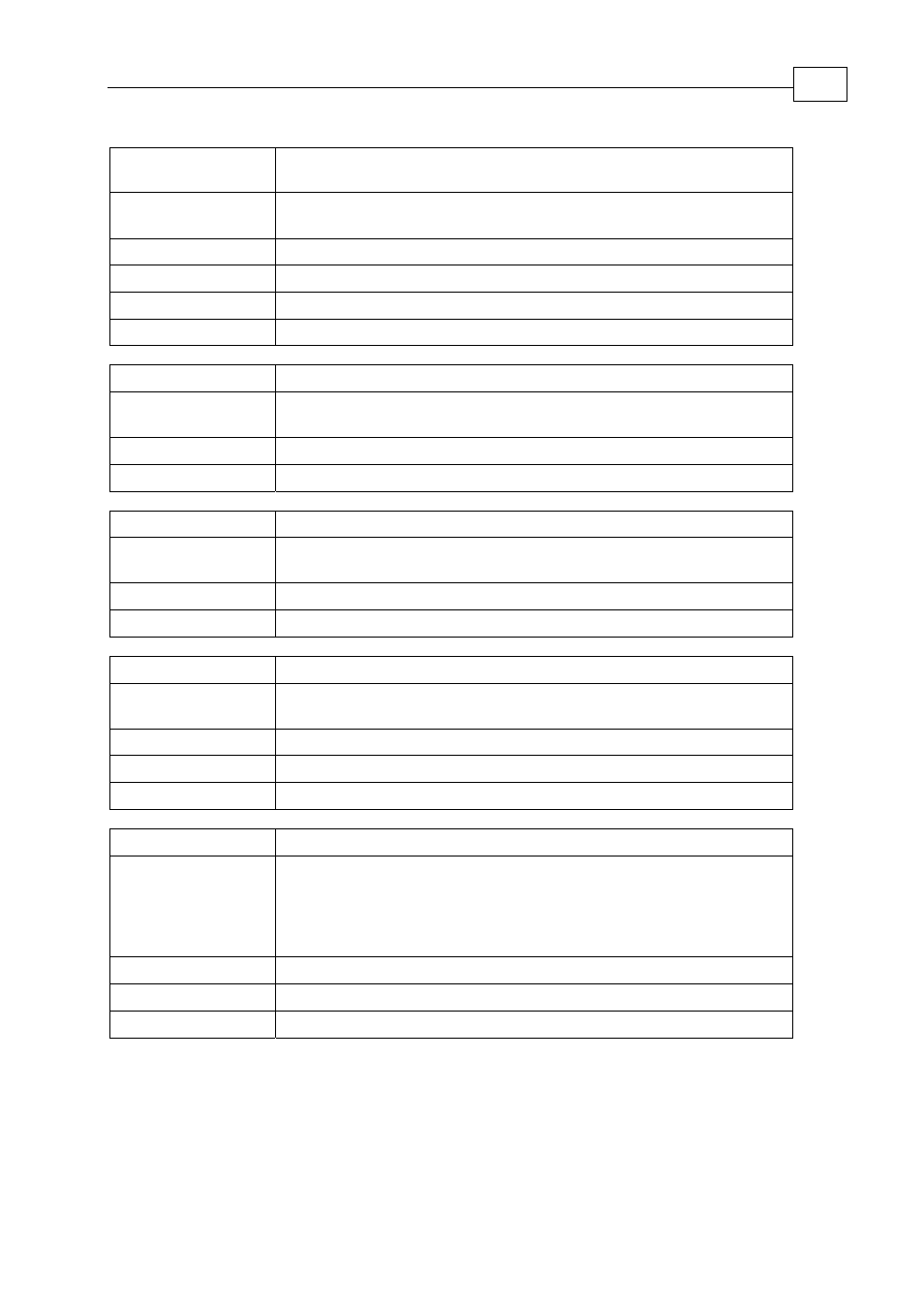
Property
ADT - Axis Delay Time – delay the start of the "do trajectory" (dotrj)
command
Explanation
The ADT property defines when to start the trajectory and must be
specified when dotrj commands are used. The default value is 20 ms.
Dimension
Milliseconds
Default
20
Limitation
20-254
Type
Unsigned integer
Property
AEL - CAN Encoder Low Limit
Explanation
AEL is needed when Axis works as a CAN Encoder slave. The
property provides Encoder limitations.
Limitation
0-0x4000
Type
Integer
Property
AEH - CAN Encoder High Limit
Explanation
AEM is needed when Axis works as CAN Encoder slave. The property
provides Encoder limitations.
Limitation
0-0x4000
Type
Integer
Property
AEM - CAN Encoder interpolation time
Explanation
AEM is needed when Axis works as CAN Encoder slave. The property
provides mode initialization and interpolation (Sync) time definition.
Dimension
Milliseconds
Limitation
1-64
Type
Unsigned integer
Property
AFP – Axis First Point
Explanation
Defines the number of lines of a PVT table that are sent to the drive at
the start. SimplIQ drives are capable of storing 64 lines. Less than 64
lines are required for starting an axis as otherwise the start of the
other axis would be delayed. This would reduce the efficiency of the
system.
Default
5
Limitation
3 – 10
Type
Unsigned integer
Maestro
Software Manual
General and Motion Instructions
MAN-MASSW (Ver. Q)
4-13