6 profiled torque (pt) mode, 1 profiled torque (pt) commands – ElmoMC Multi-Axis Motion Controller-Maestro User Manual
Page 184
a2.hof=-100
//homing offset definition for axis a2
g1.hom=1
//homing method definition
g1.hm=1
//HM
mode
activation
g1.awm
//wait for motion completed (bit 10 of SW is ON)
g1.mo=0
//motor off command
end function
HP mode activation (hp) command for compound motion objects is synchronous
under Sync messages.
10.6
Profiled Torque (PT) Mode
The profile torque mode allows transmitting the target torque value, which is
processed using the trajectory generator. In profile torque mode, torque slope and
torque profile type parameters are required. For a more detailed description of the
DSP 402 PT Mode see the Profiled Torque section in the “Elmo CANopen DS 402
Implementation Guide”.
10.6.1 Profiled Torque (PT) Commands
Note: Set and get commands are allowed for Axis objects and only set commands are
allowed for the Vector and Group objects.
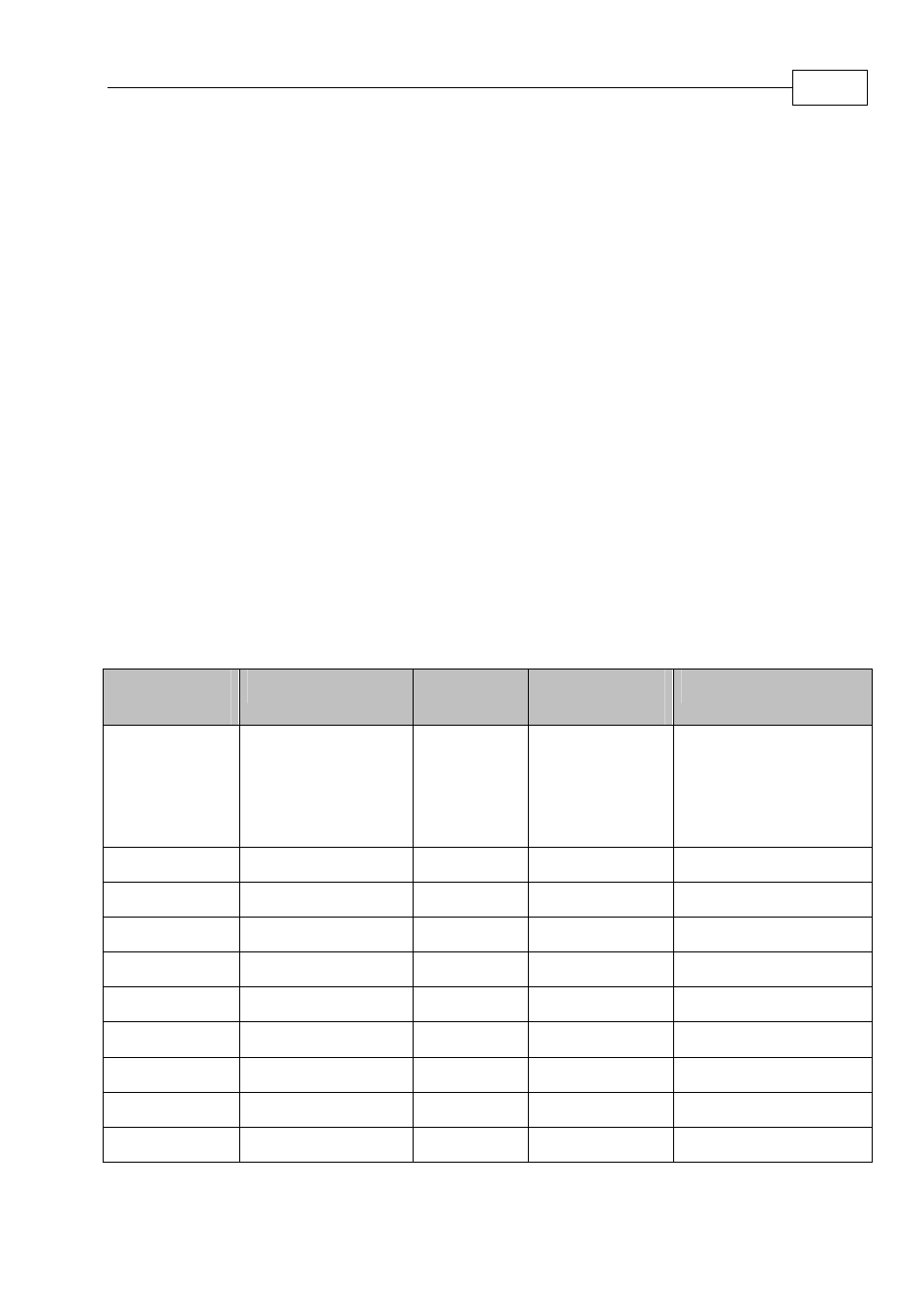
The following commands are implemented in PT mode:
Object Index
and Subindex
Full Command
Short
Command
Elmo Short
Command
Description
0x6071, 0x00
(View Section
11.8, DS402
PDO Mapping
Table)
ProfileTargetTorque
ptt
tc
Profile target torque
0x6072, 0x00
ProfileMaxTorque
pmxt
-
Profile max torque
0x6073, 0x00
ProfileMaxCurrent
pmxc -
Profile
max
current
0x6074, 0x00
ProfileDemandTorque
pdt
-
Profile demand torque
0x6077, 0x00
ProfileActualTorque
part, pat
-
Profile actual torque
0x6078, 0x00
ProfileActualCurrent
pacr -
Profile
actual
current
0x6076, 0x00
MotorRateTorque
mrt -
Motor
rate
torque
0x6075, 0x00
MotorRateCurrent
mrc
-
Motor rate current
0x6088, 0x00
TorqueProfileType
tpt -
Torque
profile
type
0x6087, 0x00
ProfileTorqueSlope
pts
-
Profile torque slope
Maestro
Software Manual
DS402 Command Reference
MAN-MASSW (Ver. Q)
10-39