2 profile position mode commands description – ElmoMC Multi-Axis Motion Controller-Maestro User Manual
Page 161
Maestro
Software Manual
DS402 Command Reference
MAN-MASSW (Ver. Q)
10-16
a1.pa=20000
//set absolute target position value
a1.bg
//start
motion
until(g_nStatus != 0)
//waiting for global variable
a1.mo=0
//motor off command
end function
// motion completed callback
function @motioncompleted(int busId, int objId)
global int g_nStatus
g_nStatus = objId
//global variable value changing
end function
10.2.2.2
Profile position Mode Commands description
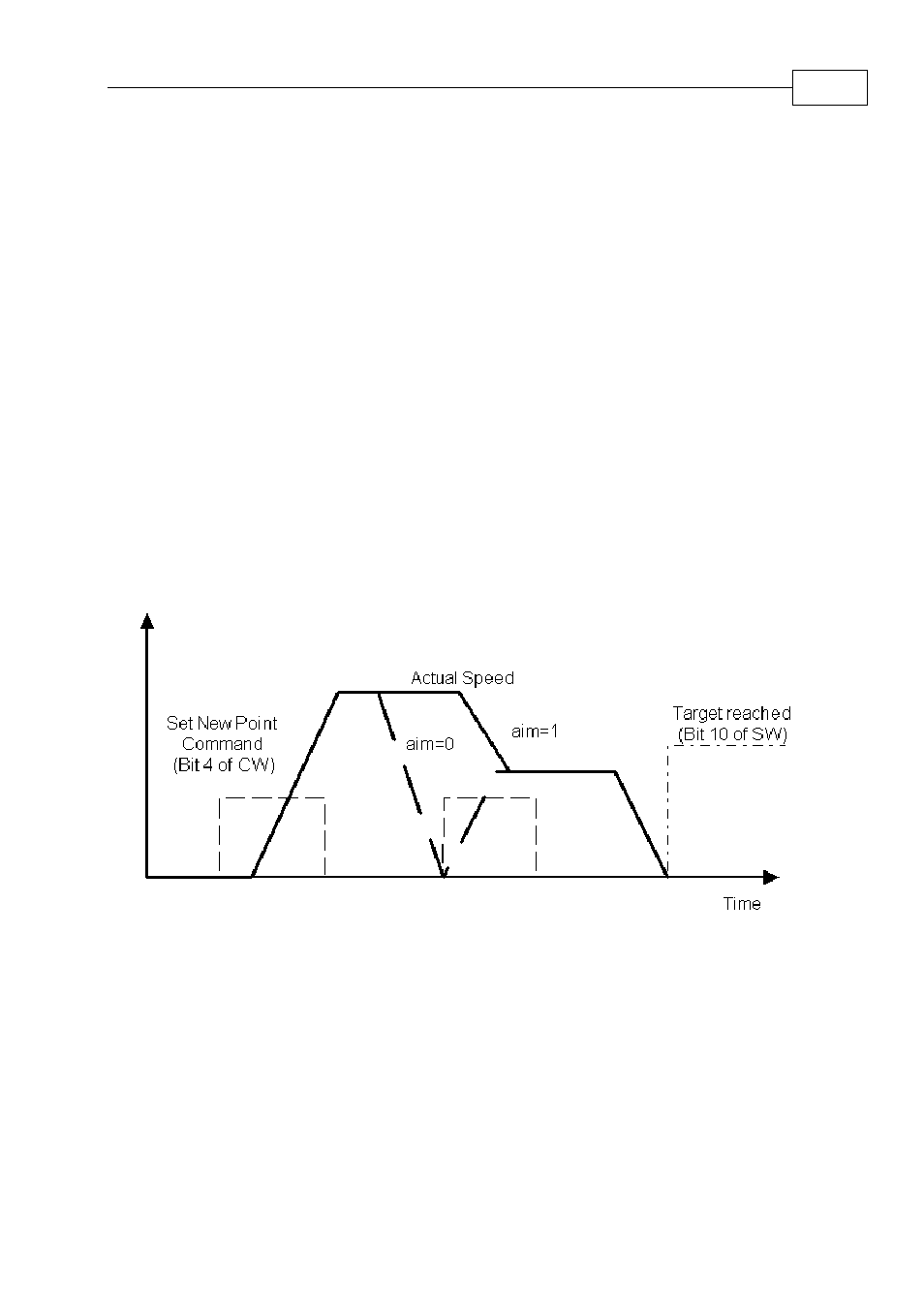
The DS402 Axis's properties aap and arp (gap, grp – for the DS402 Group, vap, vrp – for the
DS402 Vector) modifies the content of snp (apply new position) command as a new
absolute or relative target. If the target position must be changed immediately, the
property aim (vim, gim) can be used.
Figure
10-4: Change Target Position Immediately Commands
The psw - position window command - defines a symmetrical range of accepted positions
relative to the target position. If the actual value of the position encoder is within the
position window, this target position is regarded as reached. The Property awm (gwm,
vwm), motion completed waiting, is used while waiting for the motion to complete. If the
value received is 0, the motion completes event timeout lapses (timeout can be defined by
the property ato, vto, gto for DS402 Axis, Vector or Group). If, however, the return value is
current statusword, bit 10 (400h) must be on for the target to be reached.