2 profile position (pp) mode, 1 profile position (pp) commands – ElmoMC Multi-Axis Motion Controller-Maestro User Manual
Page 157
Maestro
Software Manual
DS402 Command Reference
MAN-MASSW (Ver. Q)
10-12
10.2
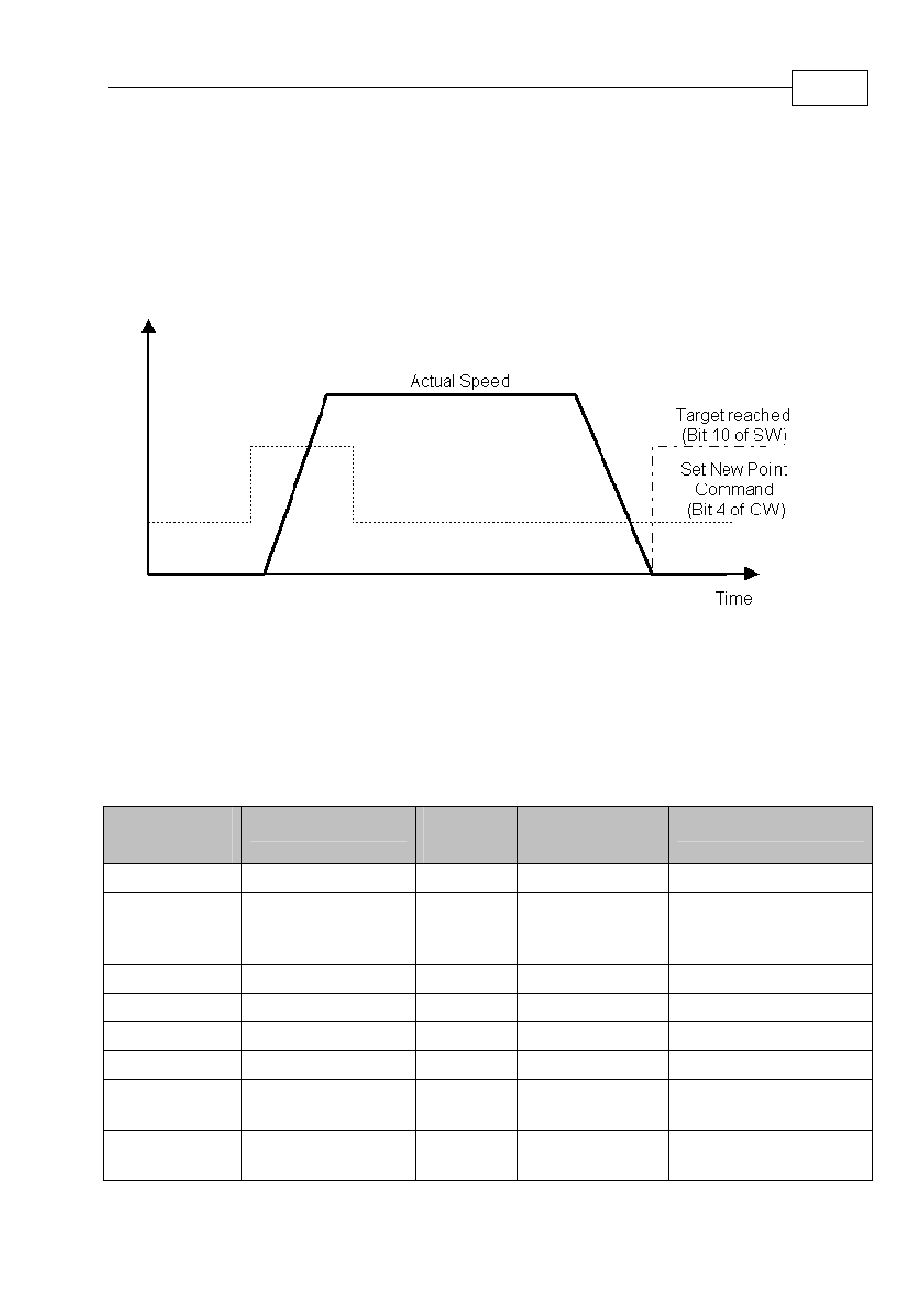
Profile Position (PP) Mode
This section describes how to set point-to-point (PTP) movement under a profiled position
where a target position is applied to the trajectory generator. The trajectory generator
input includes profiled velocity, acceleration, deceleration as well as selection of motion
type, motion polarity and stopping option. For more information, refer to Profile Position
of the Elmo CANopen DS 402 Implementation Guide.
Figure
10-2: Profile Position Command Diagram
10.2.1 Profile Position (PP) Commands
Note: Set and get commands are allowed for Axis objects and only set commands are
allowed for the Vector and Group objects.
The following commands are implemented in PP mode:
Object Index
and Subindex
Full Command
Short
Command
Elmo Short
Command
Description
0x607A, 0x00
ProfileTargetPosition
ptp
-
Profile target position
0x6040, 0x00
SetNewPoint snp
- Apply new point by
Controlword 0x0F
sending
0x6081, 0x00
ProfileVelocity prv
sp Profile
velocity
0x6083, 0x00
ProfileAcceleration
pac ac
Profile
acceleration
0x6084, 0x00
ProfileDeceleration
pdc dc
Profile
deceleration
0x6085, 0x00
QuickStopDeceleration
qsdc sd
Quick
stop
deceleration
0x6062, 0x00
ProfileDemandPosition
pdp dv
Profile demand position
(for Axis only)
0x6064, 0x00
ProfileActualPosition
pap px
Profile actual position
(for Axis only)