ElmoMC Multi-Axis Motion Controller-Maestro User Manual
Page 40
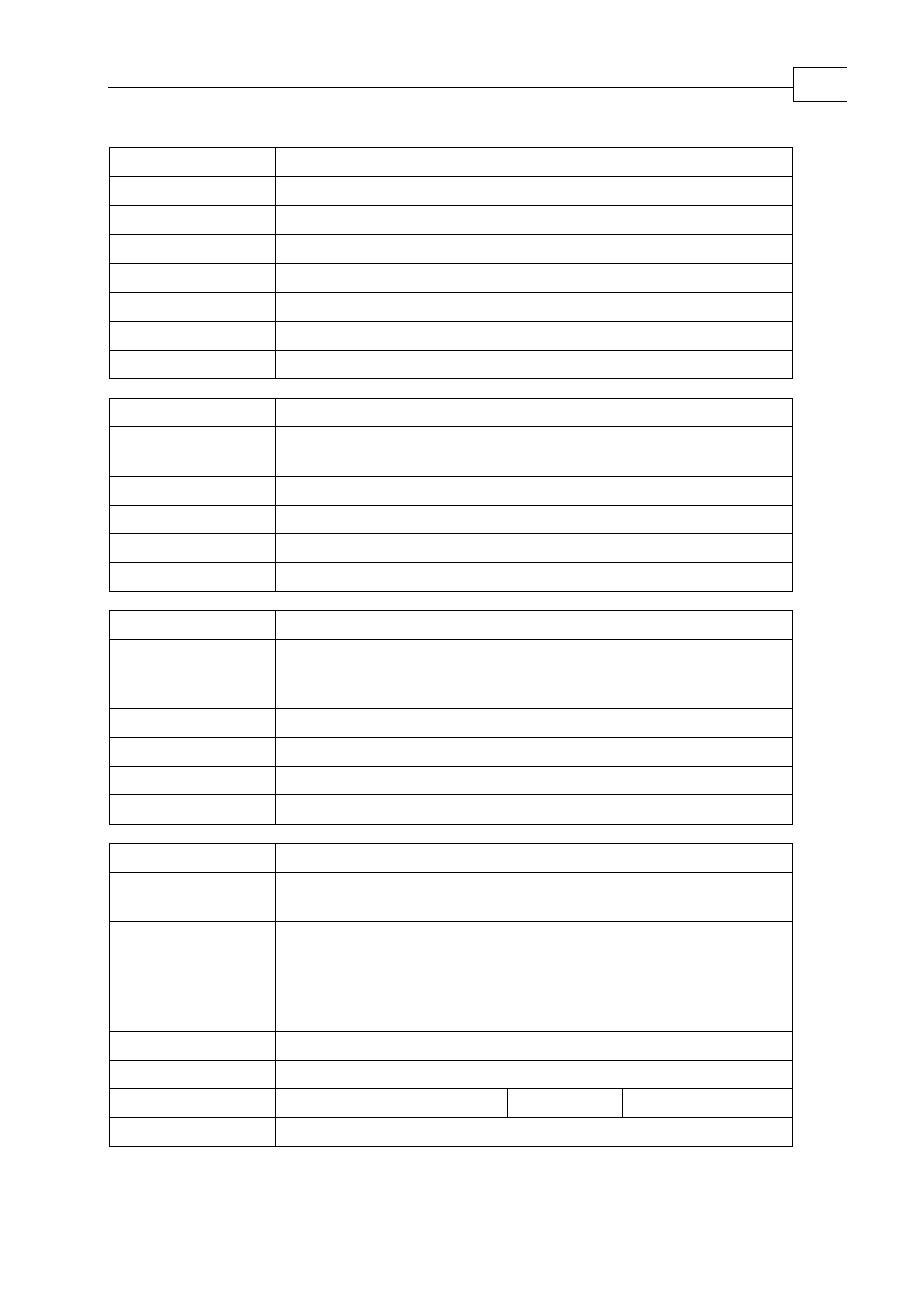
Property
VNT – low limit of calculated PVT
trajectory step time
Explanation
Set/get PVT trajectory min step time
Dimension
Milliseconds
Default
2
Limitation
1–255
Type
Unsigned integer
See also
VXT (max step time)
Example
(see Appendix B.1.6 Polygon Sample)
Property
VPE – calculated position error for PVT trajectory
Explanation
Difference between the theoretical trajectory and calculated
trajectory.
Dimension
counts
Default
100
Type
Float
See also
VVE - calculated velocity error for PVT trajectory
Property
VPP – single point size portion for PVT trajectory
Explanation
The number of PVT lines sent to a drive at a time. This helps to
"distribute" the information evenly across a multi-axis system so
that no axis is "starved" of information.
Default
5
Limitation
3 – 10
Type
Unsigned integer
See also
VFP –number of lines downloaded in the 1
st
portion of a PVT trajectory
Property
VSC – PVT trajectory smoothing curve mode
Explanation
Used with addcircle and addline to smooth the operation of the
motor at corners or joints.
Note
Available:
0-non smoothed
1-smoothed with max velocity (use the VSE command)
2-smoothed with fixed radius (use the VSR command)
3-smoothed with fixed dist from the corner (use VSD)
See also
VSD, VSE, VSP, VSR
Default
0
Limitation
1 - 254
Type
Unsigned integer
Example
(see
Appendix B.1.2.1
Circle Sample)
Maestro
Software Manual
General and Motion Instructions
MAN-MASSW (Ver. Q)
4-21