3 axis functions – ElmoMC Multi-Axis Motion Controller-Maestro User Manual
Page 35
4.2.3
Axis Functions
Motion functions apply to
Maestro
programs only. Axis related functions are listed below:
•
To call a function:
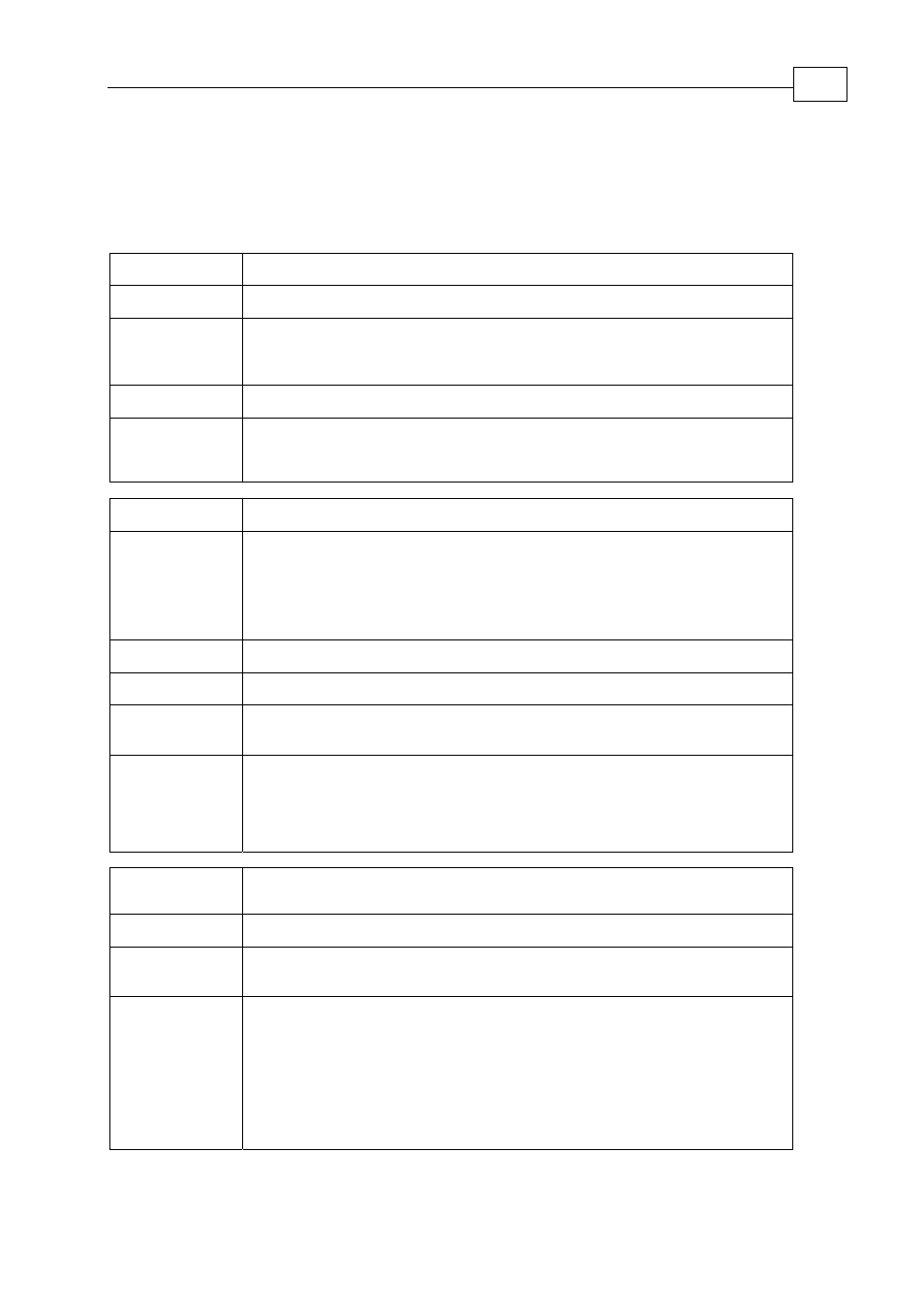
Function
addpoint - add PVT point to user's trajectory sequence
Call Format
< Axis_name>.addpoint(
Parameters
Return Value
OK or FAILED: Error message
Example
a1.addpoint(1000, 30000, 10)
For more information see the starts and ends function
(see Appendix B.1.2.2 Add Point Sample)
Function
dotrj – Do Trajectory
Explanation
Used to initialize the PVT mechanism and load the initial portion of the
PVT trajectory table to an axis and start motion.
Start motion is delayed. The delay specified by the ADT command.
The default delay value is 20 ms.
By comparison the trj command requires a bg command to start motion.
Call Format
Parameters
Return Value
OK: Trajectory name
FAILED: Error message
Example
A1.dotrj(table)
for axis name A1 run trajectory name “table”
(see Appendix B.1.2.2 Add Point Sample)
Function
ends - user's trajectory sequence for Axis motion object
(latest operator in startp(starts) – ends sequence)
Call Format
< Axis_name>.ends()
Return Value
OK: Ok
FAILED: Error message
Example
a1.startp(mytable) the trajectory name mytable
a1.addpoint(10, 1000, 10)
a1.addpoint(1000, 30000, 10)
………….
a1.addpoint(5000, 1000, 10)
a1.ends() after this the trajectory named “mytable” will contain the user’s PVT
table
(see Appendix B.1.2.1 Circle Sample)
Maestro
Software Manual
General and Motion Instructions
MAN-MASSW (Ver. Q)
4-16