ElmoMC Multi-Axis Motion Controller-Maestro User Manual
Page 179
Maestro
Software Manual
DS402 Command Reference
MAN-MASSW (Ver. Q)
10-34
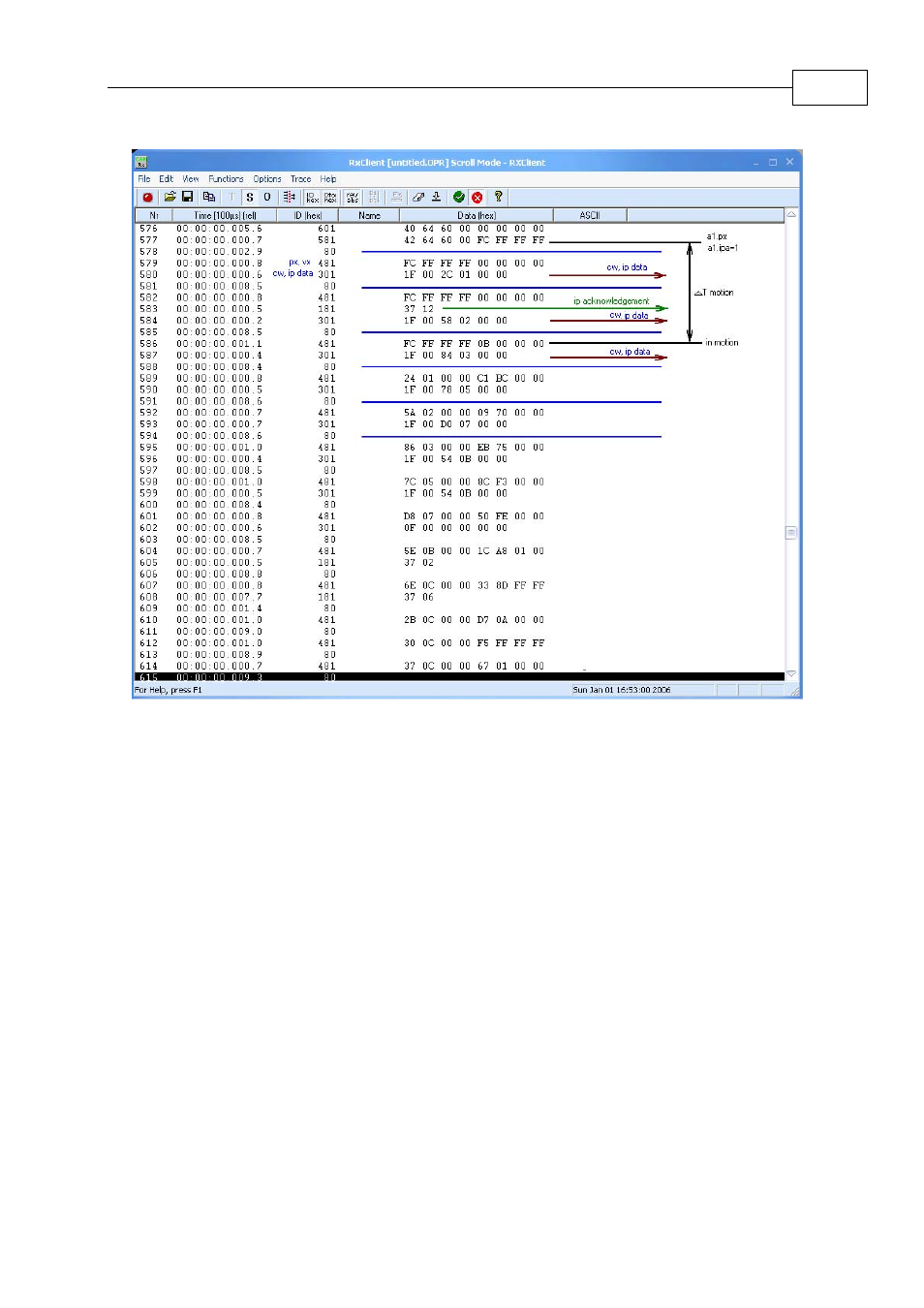
Figure
10-14: IP motion CAN Messages Diagram
Command ip (ipa, InterpolationActive) is a synchronous command so that the command
performance (CW and data record sending) begins only during the next sync period.
The next sync moves the current position to the interpolation mechanism of the servo
drive. The first point from the Axis IP queue is located in the IP buffer of the drive.
During the third sync period, the drive adds point #1 to the interpolation mechanism
and point #2 is located in the IP buffer (the linear interpolation mechanism requires
two points to begin moving.) Therefore, the time required for movement to begin
when sending an ipa command takes at most three sync periods. The interpolation
time (and sync period) depends on the number of synchronously working axes and
the CAN bus baud rate.
nSyncAxes
sT
dT
SyncTime
IPTime
×
+
=
=
,
when:
dT=1 msec – DS402 device timeout
sT≈0.5 msec for baud rate 500 kBt
nSyncAxes – number of synchronously working axes. This is a sum of all Axis
DS402 and Groups (Vectors) DS402 members, for which there is an opportunity
movement to begin simultaneously.