ElmoMC Multi-Axis Motion Controller-Maestro User Manual
Page 287
Maestro
Software Manual
Appendix C: Performance Considerations
MAN-MASSW (Ver. Q)
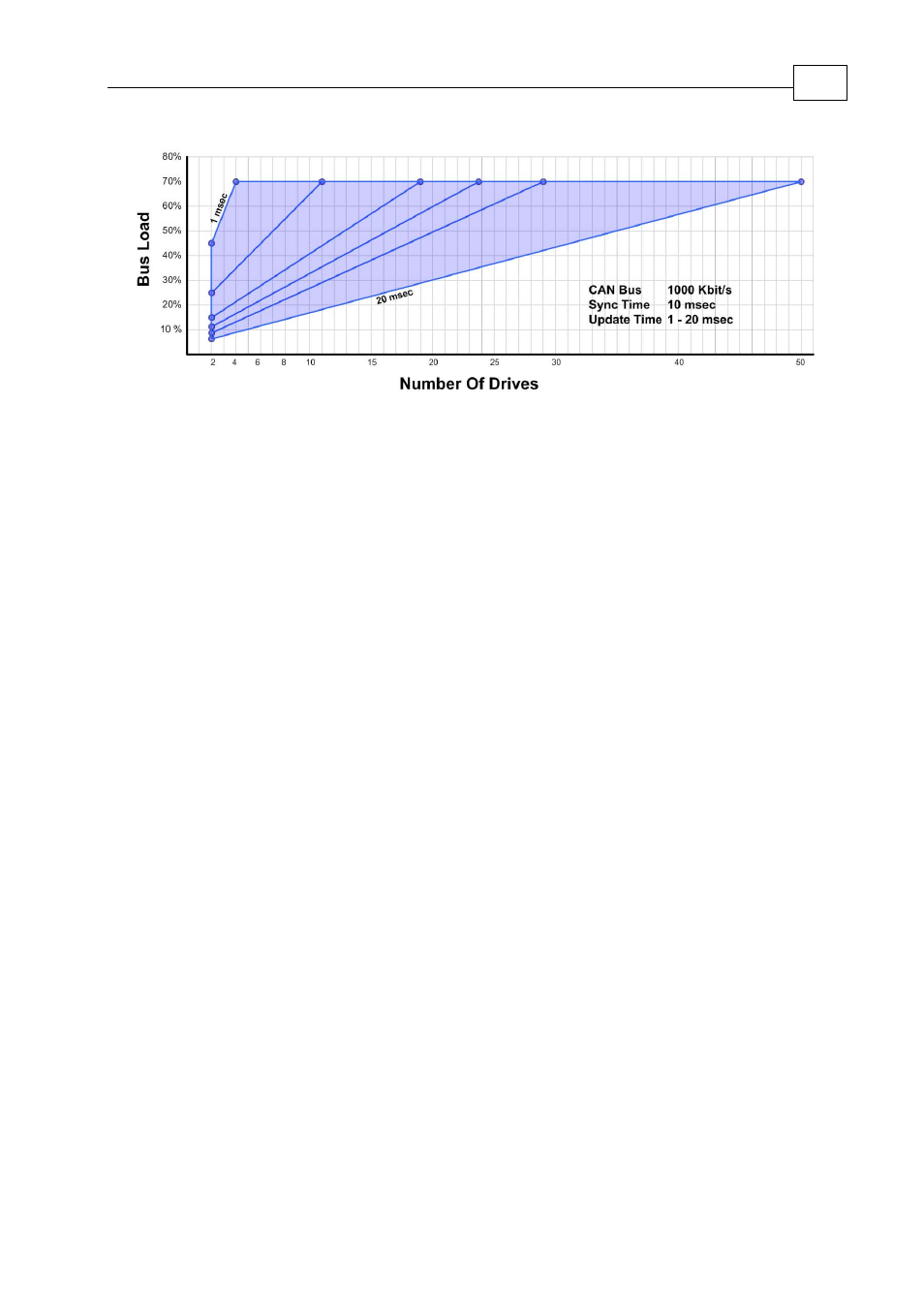
Figure C-3: CAN Bus Load at 1000Kbit/sec
The graph above can be used as a yardstick to determine the number of updates needed
to produce an acceptable path. In this case, the number of updates is a function of the
diameter, speed and maximum allowable interpolation error.
For example, if the required velocity is 100,000 counts/sec along a 1000 count diameter
path, and the allowable interpolation error is 10 counts, then the Maestro must perform
an update every 4 msec.
C-2