6 class 1 (i/o) connection server – ElmoMC Multi-Axis Motion Controller-Maestro User Manual
Page 216
Maestro
Software Manual
Ethernet/IP Communication
MAN-MASSW (Ver. Q)
11-14
The Maestro can call “@eipevent()” callback for Assembly data changing notification:
function @eipevent(int event, int param1, int param2)
// TODO: Add your Ethernet/IP event handling code here...
switch( event )
case( 8 )
TRACE( "New data for assembly %", param1 )
case( 9 )
TRACE( "New data for member % assembly %", param2, param1 )
end switch
end function
Then new data received for an assembly instance (event=8), param1 contains an assembly
instance. The new data received for a specified assembly member (event=9) - param1
contains an assembly instance and param2 contains a member ID.
11.6 Class 1 (I/O) connection server
The Assembly object binds the attributes of multiple objects, which allows data to or from
each object to be sent or received over an Ethernet/IP connection. Assembly objects can be
used to bind input data or output data. The terms “input” and “output” are defined from
the network’s point of view. An input will produce data on the network and an output will
consume data from the network. Assembly objects use Class1 connections to exchange data
between the scanner (Rockwell device) and the adapter (Maestro device).
Assembly object instances can either be dynamic or static:
•
Dynamic: assemblies with member lists created and managed by the user. The
member list can be altered by adding or deleting members. Dynamic assemblies shall
be assigned instance IDs in the vendor specific range.
• Static: assemblies with member lists defined by the device profile or by the
manufacturer of the product. The instance number, number of members and member
lists are fixed. Static assemblies can usually be implemented entirely in ROM.
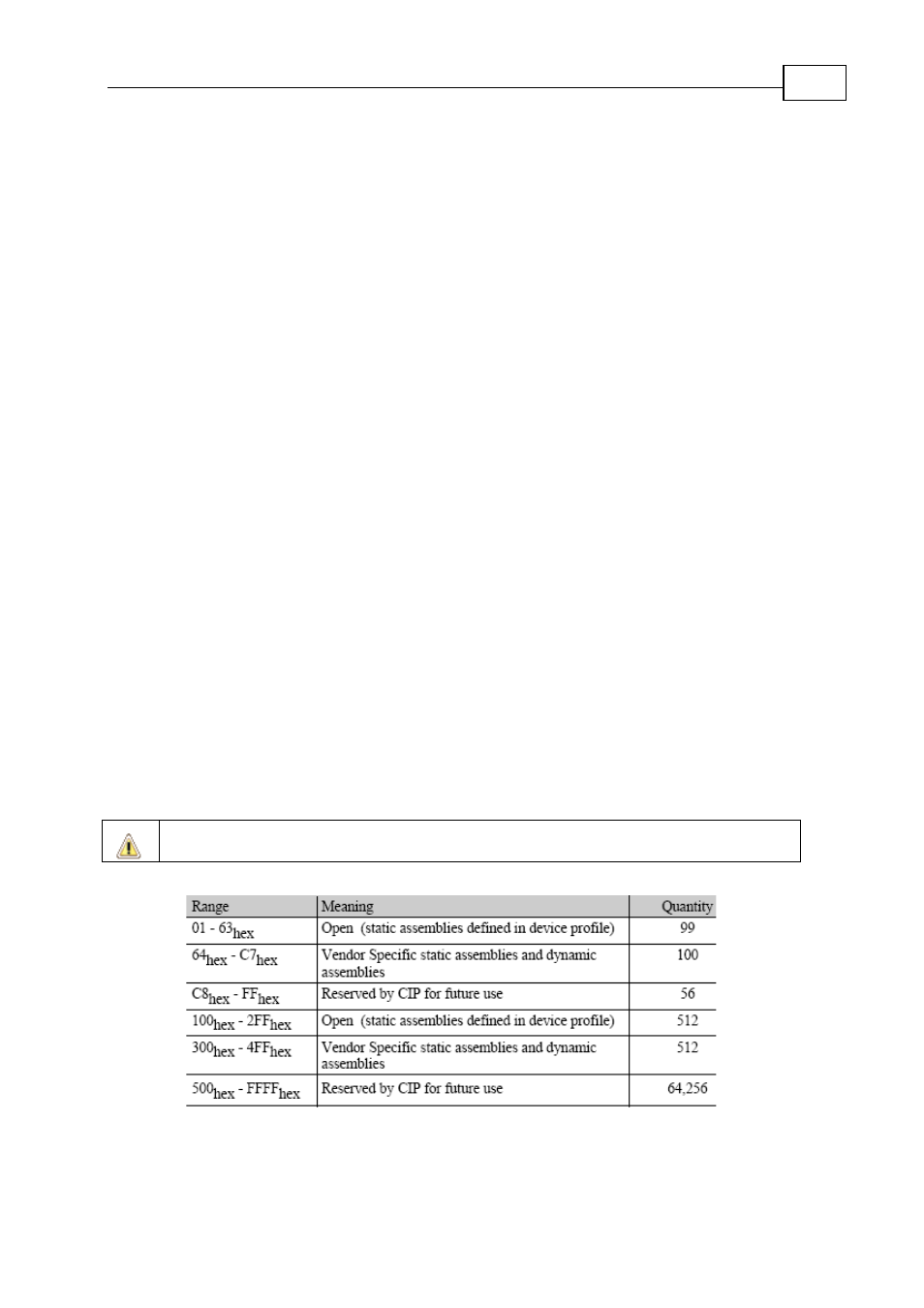
Important: Instances of the Assembly Object are divided into the following address
ranges to provide for extensions to device profiles.
Figure 11-19: Assembly Instance ID ranges