2 using homing commands, 1 homing implementation – ElmoMC Multi-Axis Motion Controller-Maestro User Manual
Page 182
Maestro
Software Manual
DS402 Command Reference
MAN-MASSW (Ver. Q)
10-37
• ato - status word waiting timeout (for wswd command (or awm property),
default value – 500 milliseconds )
• awm - motion completed waiting
• amc - motion completed callback control (must be set to 1 for callback
mechanism activation)
Vector properties connected to HM mode (for more information, view the properties
description for axis):
• vto - status word waiting timeout
• vwm - motion completed waiting
• vmc - motion completed callback control
Group properties connected to HM mode (for more information, view the properties
description for axis):
• gto - status word waiting timeout
• gwm - motion completed waiting
• gmc - motion completed callback control
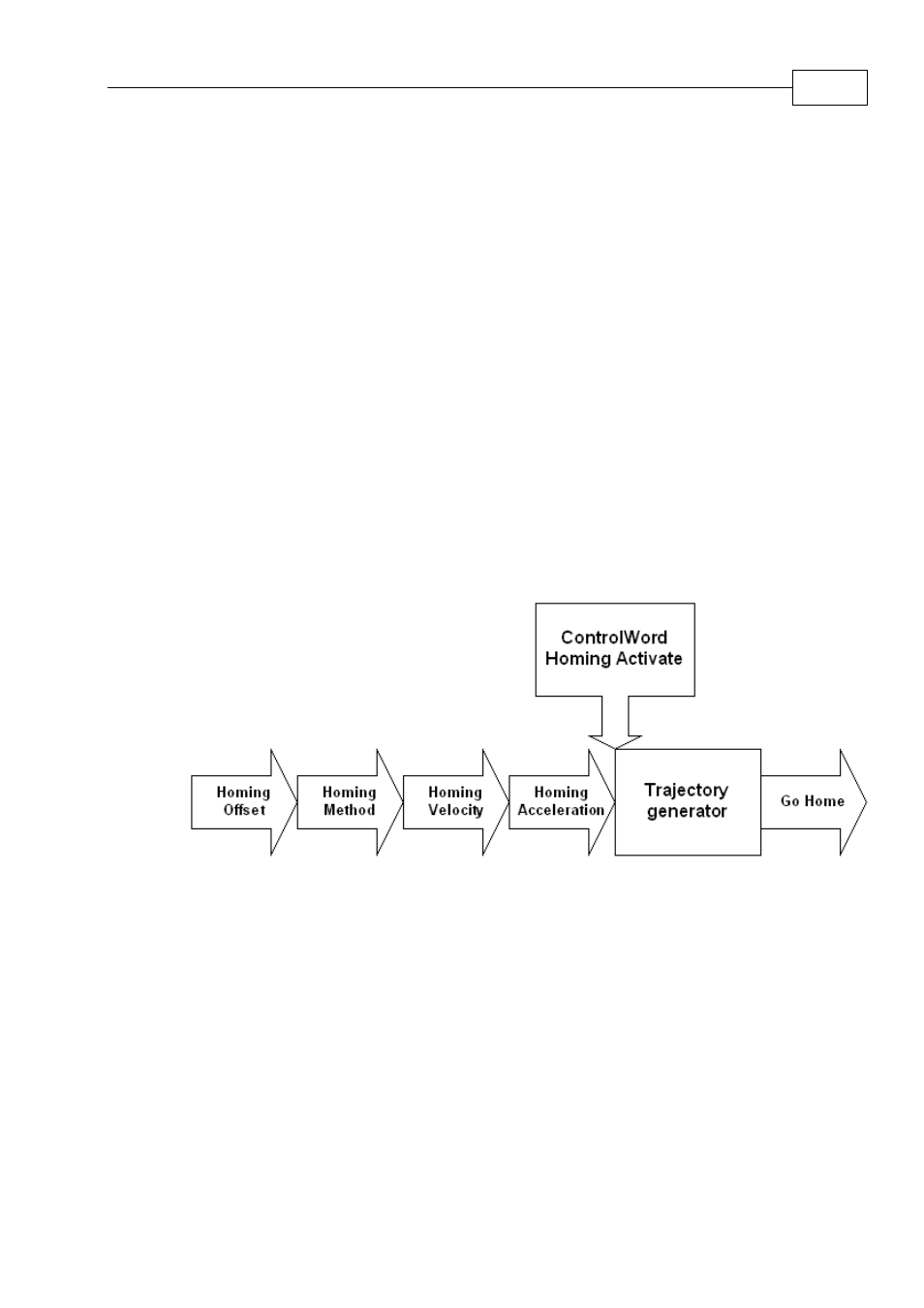
10.5.2 Using Homing Commands
10.5.2.1
Homing Implementation
Figure
10-15: Homing Motion Algorithm