2 profile position commands usage, 1 profile position motion implementation – ElmoMC Multi-Axis Motion Controller-Maestro User Manual
Page 159
Maestro
Software Manual
DS402 Command Reference
MAN-MASSW (Ver. Q)
10-14
Vector properties connected to PP mode (see also description for axis):
• vap - absolute target for profile position
• vbf - point buffering for profile position
• vim - change target position immediately
• vnp - negative position polarity
• vnv - negative velocity polarity
• vrp - relative target for profile position
• vto - status word waiting timeout
• vwm - motion completed waiting
• vmc - motion completed callback control
Group properties connected to PP mode (see also description for axis):
• gap - absolute target for profile position
• gbf - point buffering for profile position
• gim - change target position immediately
• gnp - negative position polarity
• gnv - negative velocity polarity
• grp - relative target for profile position
• gto - status word waiting timeout
• gwm - motion completed waiting
• gmc - motion completed callback control
10.2.2 Profile Position Commands Usage
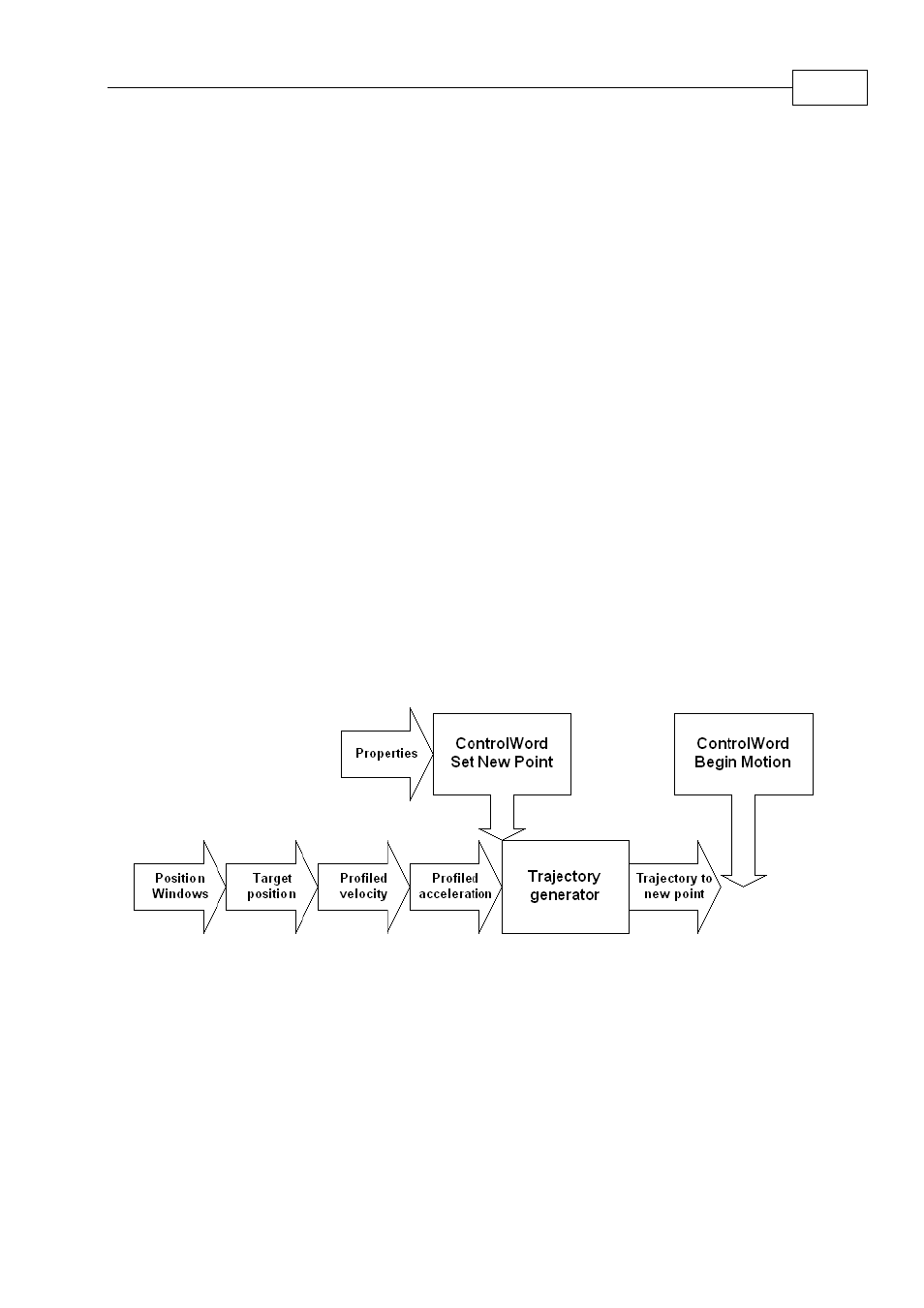
10.2.2.1
Profile Position Motion Implementation
Figure
10-3: Profiled Position Motion Algorithm