ElmoMC Multi-Axis Motion Controller-Maestro User Manual
Page 176
Maestro
Software Manual
DS402 Command Reference
MAN-MASSW (Ver. Q)
10-31
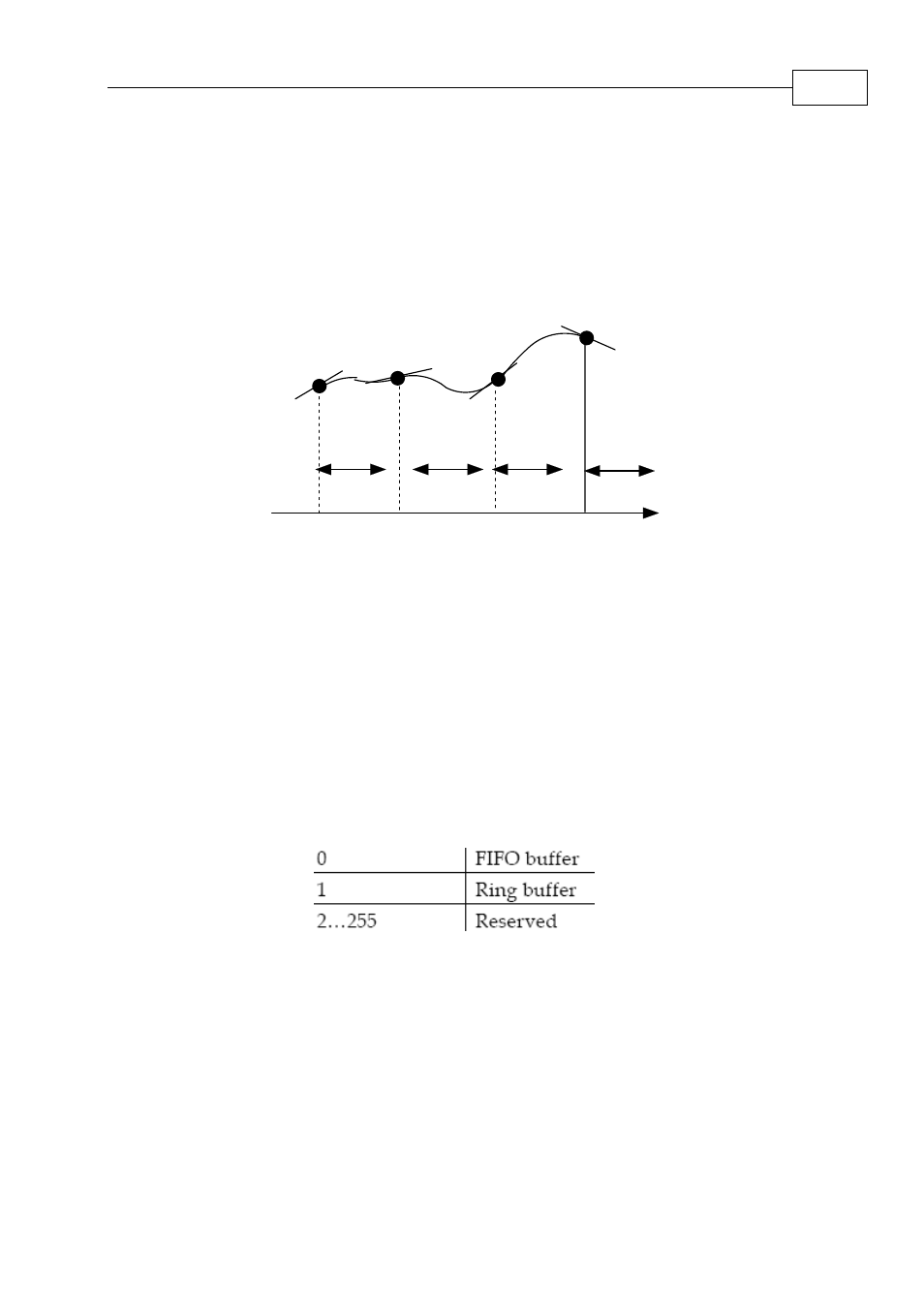
In cubic spline interpolation, the user specifies both the position and the speed at each
point in time. The drive constructs the motion path to be at the given time, position
and speed as is shown in the figure below. Spline interpolation can yield a more
accurate path specification with fewer time points but it requires care in constructing
the speed data.
Time
T start
T
Δ
T
Δ
T
Δ
T
Δ
P0
P1
P2
P3
Figure
10-12: Spline Interpolation
An interpolation time period (can be set by the iptp command) is used to define the
relative time taken between two set points for interpolating position modes. The
interpolation time unit is given milliseconds. Interpolation time must be equal to the
Sync time period.
The DS402 Axis has two data buffers: servo drive buffer and data interpolation queue
of virtual motion object.
The interpolation data configuration commands enable the user to get information
about the servo drive's buffer size and set the buffer configuration and strategy:
• ipbs - interpolation buffer size
• ipbo, InterpolationBufferOrganization - interpolation buffer organization:
FIFO (First In First Out):
If the buffer is organized as FIFO, every newly received interpolation data record
is placed at the end of the queue and the drive takes the next data record from the
top of the queue. This uses the principle of first in first out. When the last item of
a data record is stored, the buffer pointer is increased by one in order to point to
the next buffer position. With this buffer principle, the object buffer position has
no affect. The FIFO buffer is organized as a cyclic buffer so that after the last
buffer entry is updated (entry of max buffer size), the first entry may be available
again depending on actual buffer size. When the buffer is full, a CAN
EMERGENCY message is transmitted and the last message is discarded.